Unity Manual
- Unity 6.1 Beta User Manual
- What's new in Unity
- Install and upgrade
- Install Unity
- Deploy Unity across your enterprise
- Enable Unity installation by standard users (Windows)
- Use Unity through web proxies
- Enable automatic proxy configuration
- Store credentials for automatic proxy configuration (Windows)
- Store credentials for automatic proxy configuration (macOS)
- Trusting the web proxy security certificate
- Use environment variables to identify your web proxy
- Create a command file to set environment variables and open applications
- Define exceptions on your web proxy
- Licenses and activation
- Upgrade Unity
- The Editor interface
- The Project window
- The Scene view
- The Game view
- Device Simulator
- The Hierarchy window
- The Inspector window
- The Toolbar
- The status bar
- The Background Tasks window
- Console window
- Additional windows
- Undo
- Search in the Editor
- Customizing your workspace
- Preferences
- Shortcuts Manager
- Project Settings
- 2D and 3D mode settings
- Save your work
- Editor analytics
- Troubleshoot the Editor
- Unity Search
- Packages and feature sets
- Unity's Package Manager
- How Unity works with packages
- Concepts
- Configuration
- Package Manager window
- Access the Package Manager window
- Navigation panel
- List panel
- Details panel
- Features (details panel)
- Finding packages and feature sets
- Add and remove UPM packages or feature sets
- Install a feature set from the Unity registry
- Install a UPM package from a registry
- Install a UPM package from the Asset Store
- Install a UPM package from a local folder
- Install a UPM package from a local tarball file
- Install a UPM package from a Git URL
- Install a UPM package by name
- Remove a UPM package from a project
- Switch to another version of a UPM package
- Add and remove asset packages
- Disable a built-in package
- Perform an action on multiple packages
- Finding package documentation
- Inspecting packages
- Scripting API for packages
- Scoped registries
- Resolution and conflict
- Project manifest
- Troubleshooting
- Packages
- Released packages
- 2D Animation
- 2D Aseprite Importer
- 2D Pixel Perfect
- 2D PSD Importer
- 2D SpriteShape
- 2D Tilemap Extras
- Adaptive Performance
- Addressables
- Addressables for Android
- Ads Mediation
- Advertisement Legacy
- AI Navigation
- Alembic
- Analytics
- Android Logcat
- Animation Rigging
- Apple ARKit XR Plugin
- Apple visionOS XR Plugin
- AR Foundation
- Asset Manager
- Authentication
- Behavior
- Build Automation
- Burst
- CCD Management
- Character Controller
- Cinemachine
- Cloud Code
- Cloud Diagnostics
- Cloud Save
- Cloud Services Apis
- Code Coverage
- Collections
- Dedicated Server
- Deployment
- Device Simulator Devices
- Economy
- Editor Coroutines
- Entities
- Entities Graphics
- Facebook Instant Games SDK
- FBX Exporter
- Friends
- Google ARCore XR Plugin
- Havok Physics for Unity
- In App Purchasing
- Input System
- iOS 14 Advertising Support
- JetBrains Rider Editor
- Leaderboards
- Lobby
- Localization
- Magic Leap XR Plugin
- Matchmaker
- Mathematics
- Memory Profiler
- Microsoft GDK API
- Microsoft GDK Tools
- ML Agents
- Mobile Notifications
- Moderation
- Multiplay
- Multiplayer Play Mode
- Multiplayer Services
- Multiplayer Tools
- Multiplayer Widgets
- Muse Sprite
- Muse Texture
- Netcode for Entities
- Netcode for GameObjects
- Oculus XR Plugin
- OpenXR Plugin
- Performance testing API
- Player Accounts
- Polybrush
- PolySpatial Extensions
- PolySpatial visionOS
- Post Processing
- ProBuilder
- Profile Analyzer
- Project Auditor
- Push Notifications
- Recorder
- Relay
- Remote Config
- Scriptable Build Pipeline
- Sentis
- Services Tooling
- SharpZipLib
- Splines
- Sysroot Base
- Sysroot Linux x64
- System Metrics Mali
- Terrain Tools
- Timeline
- Toolchain Linux x64
- Toolchain MacOS Arm64 Linux x64
- Toolchain MacOS Linux x64
- Toolchain Win Linux x64
- Toolchain WinArm64 Linux x64
- Tutorial Authoring Tools
- Tutorial Framework
- Unity Logging
- Unity OpenXR Meta
- Unity Physics
- Unity Profiling Core API
- Unity Transport
- User Generated Content
- User Generated Content Bridge
- User Reporting
- Version Control
- Visual Scripting
- Visual Studio Editor
- Vivox
- Web Stripping Tool
- WebGL Publisher
- XR Composition Layers
- XR Hands
- XR Interaction Toolkit
- XR Plugin Management
- ZivaRT Player
- Release candidates
- Pre-release packages
- Core packages
- Built-in packages
- Accessibility
- AI
- AMD
- Android JNI
- Animation
- Asset Bundle
- Audio
- Cloth
- Director
- Image Conversion
- IMGUI
- JSONSerialize
- NVIDIA
- Particle System
- Physics
- Physics 2D
- Screen Capture
- Terrain
- Terrain Physics
- Tilemap
- UI
- UIElements
- Umbra
- Unity Web Request
- Unity Web Request Asset Bundle
- Unity Web Request Audio
- Unity Web Request Texture
- Unity Web Request WWW
- Vehicles
- Video
- VR
- Wind
- XR
- Experimental packages
- Packages by keywords
- Deprecated packages
- Released packages
- Creating custom packages
- Feature sets
- Unity's Package Manager
- Assets and media
- Asset workflow
- Importing assets
- Caching assets
- Introduction to Unity Accelerator
- Unity Accelerator requirements
- Install Unity Accelerator with the installer
- Install Unity Accelerator with Docker Hub
- Verify the Unity Accelerator version
- Configure Unity Accelerator in the Editor
- Stop and restart Unity Accelerator
- Monitor Unity Accelerator
- Use Unity Accelerator on the command line
- Mirror multiple Unity Accelerator instances
- Cache Server Project Settings reference
- Unity Accelerator Prometheus metrics reference
- Supported Asset Types
- Asset Metadata
- The Asset Database
- Reserved folder name reference
- Import Activity window
- Presets
- AssetBundles
- Scripting with Assets
- Asset packages
- Archives
- Optimizing assets
- Unity's Asset Store
- Asset Store packages
- Publish to the Asset Store
- Creating your Publisher Account
- Creating a new package draft
- Deleting a package draft
- Uploading assets to your package
- Filling in the package details
- Submitting your package for approval
- Viewing the status of your Asset Store submissions
- Collecting revenue
- Providing support to your customers
- Adding tags to published packages
- Connecting your account to Google Analytics
- Promoting your Assets
- Refunding your customers
- Upgrading packages
- Deprecating your Assets
- Issuing vouchers
- Managing your publishing team
- Asset Store Publisher portal
- Verified Solutions
- 3D game development
- 2D game development
- Introduction to 2D
- Get started with 2D game development
- 2D renderer sorting
- Sprites
- Image import as sprites
- Sprites sorting order
- Sprite Renderer
- Placeholder sprites
- Sprite editor
- Sorting groups
- Various image sizes without multiple assets
- Sprite masks
- Sprite atlas
- Sprite shape renderer
- Tilemaps in Unity
- Tilemaps
- Work with tilemaps
- Create a tilemap
- Hexagonal Tilemaps
- Isometric tilemaps in Unity
- Tilemap Collider 2D
- Tilemap component reference
- Tilemap Renderer component reference
- Tilemap Collider 2D component reference
- Troubleshoot mismatched Cell Layouts
- Tiles for tilemaps
- Tile palettes
- Create a Tile Palette
- Tile palette brushes
- Tile palette editor tools
- New tile palette properties reference
- Tile palette preferences reference
- Tile palette editor reference
- Tile Sets
- Grid component reference
- 2D physics
- Rigidbody 2D
- Collider 2D
- Effectors 2D
- 2D joints
- Physics 2D Profiler
- Constant Force 2D reference
- Physics Material 2D reference
- 2D game development in URP
- 2D lighting in URP
- Types of 2D lights
- Introduction to the 2D lighting system in URP
- Prepare your project for 2D lighting
- Light 2D component reference for URP
- Configure a 2D light
- Set up the 2D Renderer asset in URP
- Prepare and upgrade sprites for 2D lighting in URP
- Enable 2D lighting with the Tilemap Renderer in URP
- Blend Modes in 2D lighting
- Blend Modes
- Masking
- Add normal map and mask textures to a sprite in URP
- HDR emulation scale
- Create shadows with Shadow Caster 2D in URP
- Create a 2D sprite lit Shader Graph in URP
- Light a VFX Graph asset with 2D lights in URP
- Optimizing 2D lights
- Optimize 2D lights
- Introduction to 2D light batching
- Check how Unity batches lights
- 2D Renderer asset component reference for URP
- Light Blend Styles component reference for URP
- Precise pixel scaling and rotation via the Pixel Perfect Camera in URP
- 2D lighting in URP
- XR
- Multiplayer
- Platform development
- Cross-platform features and considerations
- Troubleshooting common cross-platform issues
- Using Unity as a Library in other applications
- Deep linking
- Xcode frame debugger Unity integration
- Build path requirements for target platforms
- Graphics API support
- Reducing the file size of your build
- Build Player Pipeline
- Accessibility for mobile applications
- Unity Remote
- Android
- Introducing Android
- Getting started with Android
- Developing for Android
- Android mobile scripting
- Input for Android devices
- Android application size restrictions
- Graphics for Android
- Testing and debugging
- Optimization for Android
- Create and use plug-ins in Android
- Integrating Unity into Android applications
- Android application entry points
- Deep linking on Android
- Device features and permissions
- Handle Android crashes
- Quit a Unity Android application
- Building and delivering for Android
- Dedicated Server
- Embedded systems
- iOS
- Introducing iOS
- Getting started with iOS
- Developing for iOS
- Building and delivering for iOS
- Linux
- macOS
- tvOS
- Universal Windows Platform
- Introduction to Universal Windows Platform
- Get started with Universal Windows Platform
- Develop for Universal Windows Platform
- Build and deliver for Universal Windows Platform
- visionOS
- Web
- Web introduction
- Web development
- Web Player settings
- Interaction with browser scripting
- Code examples: Call JavaScript and C/C++/C# functions in Unity
- Set up your JavaScript plug-in
- Call JavaScript functions from Unity C# scripts
- Call Unity C# script functions from JavaScript
- Call C/C++/C# functions from Unity C# scripts
- Compile a static library as a Unity plug-in
- Create callbacks between Unity C#, JavaScript, and C/C++/C# code
- JavaScript interface in Unity Web builds
- Replace deprecated browser interaction code
- Web native plug-ins for Emscripten
- Memory in Unity Web
- Cache behavior in Web
- Web graphics APIs
- Audio in Web
- Video playback in Web
- Texture compression in Web
- Embedded resources in Web
- Input in Web
- Configure a Web Canvas size
- Web browser access to device features
- Web networking
- WebAssembly 2023
- Web performance considerations
- Debug and troubleshoot Web builds
- Build and distribute a Web application
- Facebook Instant Games
- Windows
- Cross-platform features and considerations
- GameObjects
- Introduction to GameObjects
- GameObject fundamentals
- Primitive and placeholder objects
- Components
- Models
- Meshes
- Prefabs
- Constraints
- Scenes
- Cameras
- Introduction to cameras
- The camera view
- Using multiple cameras
- Changing resolution scale
- Excluding hidden objects with occlusion culling
- Occlusion culling
- Set up a scene for occlusion culling
- Set up multiple scenes for occlusion culling
- Cull moving GameObjects
- Create high-precision occlusion areas
- Control occlusion in areas with Occlusion Portals
- Occlusion Culling window reference
- Configure culling with the CullingGroup API
- Troubleshooting occlusion culling
- Simulating real-world cameras with Physical Cameras
- Camera output
- Cameras in URP
- Introduction to cameras in URP
- Camera render types in URP
- Multiple cameras in URP
- Camera render order in URP
- Motion vectors in URP
- Upscaling resolution in URP with Spatial-Temporal Post-Processing
- Access camera data with the Universal Additional Camera Data component in URP
- Camera Inspector windows reference for URP
- Cameras in the Built-In Render Pipeline
- Troubleshooting cameras
- World building
- Sky
- Terrain
- Creating and editing Terrains
- Create Neighbor Terrains
- Terrain tools
- Terrain Layers
- Brushes
- Trees
- Grass and other details
- Working with Heightmaps
- Terrain Settings reference
- Using Terrain at runtime
- Terrain Tools package
- Physics
- Built-in 3D Physics
- Character control
- Rigidbody physics
- Collision
- Joints
- Articulations
- Ragdoll physics
- Cloth
- Multi-scene physics
- Physics Debug window reference
- Physics Profiler module
- Built-in 3D Physics
- Input
- UI systems
- Comparison of UI systems in Unity
- UI Toolkit
- Get started with UI Toolkit
- UI Builder
- Structure UI
- The visual tree
- Structure UI with UXML
- Structure UI with C# scripts
- Custom controls
- Best practices for managing elements
- Encapsulate UXML documents with logic
- Visual elements reference
- BindableElement
- VisualElement
- BoundsField
- BoundsIntField
- Box
- Button
- ColorField
- CurveField
- DoubleField
- DropdownField
- EnumField
- EnumFlagsField
- FloatField
- Foldout
- GradientField
- GroupBox
- Hash128Field
- HelpBox
- IMGUIContainer
- Image
- InspectorElement
- IntegerField
- Label
- LayerField
- LayerMaskField
- LongField
- ListView
- MaskField
- Mask64Field
- MinMaxSlider
- MultiColumnListView
- MultiColumnTreeView
- ObjectField
- PopupWindow
- ProgressBar
- PropertyField
- RadioButton
- RadioButtonGroup
- RectField
- RectIntField
- RepeatButton
- RenderingLayerMaskField
- ScrollView
- Scroller
- Slider
- SliderInt
- Tab
- TabView
- TagField
- TextElement
- TextField
- TemplateContainer
- Toggle
- ToggleButtonGroup
- Toolbar
- ToolbarBreadcrumbs
- ToolbarButton
- ToolbarMenu
- ToolbarPopupSearchField
- ToolbarSearchField
- ToolbarSpacer
- ToolbarToggle
- TreeView
- TwoPaneSplitView
- UnsignedLongField
- UnsignedIntegerField
- Vector2Field
- Vector2IntField
- Vector3Field
- Vector3IntField
- Vector4Field
- Structure UI examples
- Create list and tree views
- Create a complex list view
- Create a list view runtime UI
- Wrap content inside a scroll view
- Create a tabbed menu
- Create a pop-up window
- Use Toggle to create a conditional UI
- Create a custom control with two attributes
- Create a slide toggle custom control
- Create a bindable custom control
- Create a custom style for a custom control
- Create a drag-and-drop list and tree views between windows
- Create an aspect ratio custom control
- Style UI
- Control behavior with events
- UI Renderer
- Data binding
- Comparison of the binding systems
- Runtime data binding
- SerializedObject data binding
- Introduction to SerializedObject data binding
- Bindable elements reference
- Bindable data types and fields
- Binding system implementation details
- Binding examples
- Bind with binding path in C# script
- Bind without the binding path
- Bind with UXML and C# script
- Create a binding with the Inspector
- Bind to nested properties
- Bind to a UXML template
- Receive callbacks when a bound property changes
- Receive callbacks when any bound properties change
- Bind to a list with ListView
- Bind to a list without ListView
- Bind a custom control
- Bind a custom control to custom data type
- Support for Editor UI
- Support for runtime UI
- Work with text
- Test UI
- Examples
- Migration guides
- Unity UI
- Immediate Mode GUI (IMGUI)
- Animation
- Audio
- Audio overview
- Audio files
- Tracker Modules
- Audio Mixer
- Native audio plug-in SDK
- Audio playlist randomization
- Audio Profiler module
- Ambisonic Audio
- Audio Reference
- Audio Clip
- Audio Listener
- Audio Source
- Audio Mixer
- Audio Filters
- Audio Effects
- Audio Low Pass Effect
- Audio High Pass Effect
- Audio Echo Effect
- Audio Flange Effect
- Audio Distortion Effect
- Audio Normalize Effect
- Audio Parametric Equalizer Effect
- Audio Pitch Shifter Effect
- Audio Chorus Effect
- Audio Compressor Effect
- Audio SFX Reverb Effect
- Audio Low Pass Simple Effect
- Audio High Pass Simple Effect
- Reverb Zones
- Microphone
- Audio Settings
- Video and cutscenes
- Video sources
- Import and preview video clips
- Use video sources
- Understand video files
- Video file compatibility with the Unity Editor
- Video file compatibility with target platforms
- Use unsupported video files in the Editor
- Video encoding compatibility reference
- Transcoding video files
- Video transparency support
- Video Clip Importer reference
- Video Player
- Video Profiler module
- Video sources
- Lighting
- Introduction to lighting
- Light sources
- Direct and indirect lighting
- Lighting data
- Precalculating surface lighting with lightmaps
- Global illumination
- Baking lightmaps before runtime
- Creating lightmaps at runtime with Enlighten Realtime Global Illumination
- Configuring lightmapping
- Lightmap UVs
- Precalculating indirect light with Light Probes
- Save and load lighting settings with Lightmap Parameters Assets
- Shadows
- Reflections
- Lighting in URP
- Introduction to lighting in the Universal Render Pipeline
- Light limits in URP
- View and control a light from its perspective in URP
- Improve the visual fidelity of lightmaps
- Shadows in URP
- Reflections in URP
- Adaptive Probe Volumes (APV) in URP
- Introduction to Adaptive Probe Volumes
- Use Adaptive Probe Volumes
- Display Adaptive Probe Volumes
- Configure the size and density of Adaptive Probe Volumes
- Bake multiple scenes together with Baking Sets
- Changing lighting at runtime
- Optimize loading Adaptive Probe Volume data
- Troubleshooting Adaptive Probe Volumes
- Adaptive Probe Volume Inspector reference
- Adaptive Probe Volumes panel reference
- Probe Volumes Options Override reference
- Probe Adjustment Volume component reference
- Rendering Layers in URP
- Custom lighting in URP
- Universal Additional Light Data component in URP
- Light component Inspector window reference for URP
- Lighting in the Built-In Render Pipeline
- Per-pixel and per-vertex lights in the Built-In Render Pipeline
- Emit light from a GameObject in the Built-In Render Pipeline
- Create cookies in the Built-In Render Pipeline
- Customize how shaders contribute lightmap data in the Built-In Render Pipeline
- Shadows in the Built-In Render Pipeline
- Configure a GameObject to sample more Light Probes in the Built-In Render Pipeline
- Introduction to Light Probe Proxy Volumes in the Built-In Render Pipeline
- Set a GameObject to use a Light Probe Proxy Volume in the Built-In Render Pipeline
- Configure a Light Probe Proxy Volume in the Built-In Render Pipeline
- Light Probe Proxy Volume component reference for the Built-In Render Pipeline
- Add Light Probe Proxy Volume support to a custom shader in the Built-In Render Pipeline
- Blend Reflection Probes in the Built-In Render Pipeline
- Light component Inspector window reference for the Built-In-Render-Pipeline
- Optimize lighting in the Built-In Render Pipeline
- Lighting reference
- Materials and shaders
- Materials
- Prebuilt materials and shaders
- Introduction to shaders
- Prebuilt shaders render pipeline compatibility reference
- Configuring material properties in prebuilt shaders
- Prebuilt shaders in URP
- Shading models in URP
- Choose a prebuilt shader in URP
- Assign a shader to a material in URP
- Reducing shader variants in URP
- Shader Material Inspector window reference for URP
- Blending Modes in URP
- Lit Shader Material Inspector window reference for URP
- Simple Lit Shader Material Inspector window reference for URP
- Complex Lit Shader Material Inspector window reference for URP
- Baked Lit Shader Material Inspector window reference for URP
- Unlit Shader Material Inspector window reference for URP
- Terrain Lit Shader Material Inspector window reference for URP
- Particles Lit Shader Material Inspector window reference for URP
- Particles Simple Lit Shader Material Inspector window reference for URP
- Particles Unlit Shader Material Inspector window reference for URP
- Canvas Shader Graph
- Prebuilt shaders in the Built-In Render Pipeline
- Standard Shader in the Built-In Render Pipeline
- Introduction to the Standard Shader in the Built-In Render Pipeline
- Choose a metallic or specular shader in the Built-In Render Pipeline
- Configuring material properties in the Standard Shader in the Built-In Render Pipeline
- Make a material transparent
- Set the color of a material in the Standard Shader
- Configure reflections with the Standard Shader
- Configure edge reflections (Fresnel effect)
- Configure specular reflections in the Standard Shader
- Configure smoothness with the Standard Shader
- Set the Rendering Mode in the Standard Shader using a script
- Standard Shader realistic settings in the Built-In Render Pipeline reference
- Customize the Standard shader source code in the Built-In Render Pipeline
- Standard Shader Material Inspector window reference for the Built-In Render Pipeline
- Particle shaders in the Built-In Render Pipeline
- Autodesk Interactive shader in the Built-In Render Pipeline
- Replace shaders at runtime in the Built-In Render Pipeline
- Standard Shader in the Built-In Render Pipeline
- Legacy prebuilt shaders
- Custom textures
- Get started with textures
- Import a texture
- 2D texture arrays
- Cubemaps
- 3D textures
- Rendering to a texture
- Playing video in Movie Textures
- Texture optimization
- Loading textures in the background
- Optimizing GPU texture memory with mipmap streaming
- Sparse Textures
- Streaming Virtual Texturing
- Streaming Virtual Texturing requirements and compatibility
- How Streaming Virtual Texturing works
- Enabling Streaming Virtual Texturing in your project
- Using Streaming Virtual Texturing in Shader Graph
- Cache Management for Virtual Texturing
- Marking textures as "Virtual Texturing Only"
- Virtual Texturing error material
- Virtual Texturing Profiler module
- Textures reference
- Texture Import Settings window reference
- Default texture Import Settings window reference
- Normal Map texture Import Settings window reference
- Editor GUI and Legacy GUI texture Import Settings window reference
- Sprite (2D and UI) texture Import Settings window reference
- Cubemap texture Import Settings window reference
- 3D texture preview reference
- Cursor texture Import Settings window reference
- Cookie texture Import Settings window reference
- Lightmap texture Import Settings window reference
- Lightmap texture Import Settings window reference
- Shadowmask texture Import Settings window reference
- Single Channel texture Import Settings window reference
- Movie Texture Inspector window reference
- Render Texture Inspector window reference
- Custom Render Texture Inspector window reference
- Custom shaders
- Writing custom shaders
- Creating shaders with Shader Graph
- Writing shaders in code
- Introduction to writing shaders in code
- Shader object fundamentals
- Writing a custom shader in ShaderLab and HLSL
- Create a shader file
- Add a subshader in a custom shader
- Add a shader pass in a custom shader
- Include a shader pass with the UsePass command
- Writing HLSL shader programs
- Setting the render state on the GPU
- Enable conservative rasterization in a shader
- Set the culling mode in a shader
- Set the depth bias in a shader
- Set the depth clip mode in a shader
- Set the depth testing mode in a shader
- Disable writing to the depth buffer in a shader
- Check or write to the stencil buffer in a shader
- Set the blending mode in a shader
- Set the color channels the GPU renders to
- Reduce aliasing with AlphaToMask mode
- Group commands with the Category block
- Adding material properties to shaders
- Changing how shaders work via branching and keywords
- Branching in shaders
- Shader keywords
- Configure when and if Unity uses a shader
- Introduction to shader tags
- Add a shader tag to a SubShader or Pass
- Set a shader to require URP or HDRP
- Set a shader to require a graphics API or platform
- Set a shader to require a shader model or GPU feature
- Set a shader to require a package
- Set the render queue of a shader
- Set when Unity runs a shader pass via a LightMode tag
- Prioritize lower quality shaders with the LOD command
- Disable dynamic batching of a shader
- Get tag values in a script
- Troubleshooting package requirement definitions
- Compute shaders
- Optimize shaders
- Writing custom shaders in URP
- Writing custom shaders in the Built-In Render Pipeline
- Writing Surface Shaders
- Introduction to surface shaders in the Built-In Render Pipeline
- Surface Shader output structures in the Built-In Render Pipeline
- Surface Shaders and rendering paths in the Built-In Render Pipeline
- Create a surface shader in the Built-In Render Pipeline
- Set the lighting model in a Surface Shader in the Built-In Render Pipeline
- Optimize Surface Shaders
- Surface Shader examples in the Built-In Render Pipeline
- Normal mapping Surface Shader example in the Built-In Render Pipeline
- Reflection Surface Shader examples in the Built-In Render Pipeline
- Vertex modifier Surface Shader example in the Built-In Render Pipeline
- Custom data Surface Shader example in the Built-In Render Pipeline
- Final color modifier Surface Shader example in the Built-In Render Pipeline
- Decals Surface Shader example in the Built-In Render Pipeline
- Wrapped diffuse Surface Shader example in the Built-In Render Pipeline
- Toon shading Surface Shader example in the Built-In Render Pipeline
- Global illumination Surface Shader example in the Built-In Render Pipeline
- Tessellation Surface Shader examples in the Built-In Render Pipeline
- Surface Shader language reference for the Built-In Render Pipeline
- Shader methods in the Built-In Render Pipeline
- Get the current framebuffer with the GrabPass command
- HLSL shader examples in the Built-in Render Pipeline
- Single color shader example in the Built-In Render Pipeline
- Checkerboard pattern shader example in the Built-In Render Pipeline
- Simple unlit shader example in the Built-In Render Pipeline
- Mesh normals shader example in the Built-In Render Pipeline
- Reflections shader example in the Built-In Render Pipeline
- Normal map texturing shader example in the Built-In Render Pipeline
- Tri-planar texturing shader example in the Built-In Render Pipeline
- Simple diffuse lighting shader example in the Built-In Render Pipeline
- Ambient light shader example in the Built-In Render Pipeline
- Shadow casting shader example in the Built-In Render Pipeline
- Receiving shadows shader example in the Built-In Render Pipeline
- Fog shader example in the Built-In Render Pipeline
- Visualizing vertex data shader examples in the Built-In Render Pipeline
- Writing Surface Shaders
- Troubleshooting shaders
- Shader languages reference
- ShaderLab language reference
- Shader in ShaderLab reference
- SubShader in ShaderLab reference
- Pass in ShaderLab reference
- GPU render state commands in ShaderLab reference
- AlphaToMask command in ShaderLab reference
- Blend command in ShaderLab reference
- BlendOp command in ShaderLab reference
- ColorMask command in ShaderLab reference
- Conservative command in ShaderLab reference
- Cull command in ShaderLab reference
- Offset command in ShaderLab reference
- Stencil command in ShaderLab reference
- ZClip command in ShaderLab reference
- ZTest command in ShaderLab reference
- ZWrite command in ShaderLab reference
- PackageRequirements block in ShaderLab reference
- ShaderLab legacy functionality reference
- HLSL pragma directives reference
- HLSL pragma target command reference
- HLSL pragma require command reference
- Built-in shader variables reference
- ShaderLab language reference
- Writing custom shaders
- Color and High Dynamic Range (HDR)
- Visual effects
- Particle effects
- Choosing your particle system solution
- Create and view a Particle System
- Vary Particle System properties over time
- Configuring particles
- Access the Particle System from the Animation system
- Custom data streams in Particle Systems
- Particle System optimization
- Particle System component reference
- Particle System module component reference
- Activate and access Particle System modules
- Main module reference
- Emission module reference
- Shape module reference
- Velocity over Lifetime module reference
- Noise module reference
- Limit Velocity over Lifetime module reference
- Inherit Velocity module reference
- Lifetime by Emitter Speed module reference
- Force over Lifetime module reference
- Color over Lifetime module reference
- Color by Speed module reference
- Size over Lifetime module reference
- Size by Speed module reference
- Rotation over Lifetime module reference
- Rotation by Speed module reference
- External Forces module reference
- Collision module reference
- Triggers module reference
- Sub Emitters module reference
- Texture Sheet Animation module reference
- Lights module reference
- Trails module reference
- Custom Data module reference
- Renderer module reference
- Particle System Force Field component reference
- Decals
- Lens flares
- Light halos
- Lines and trails
- Visual Effect Graph
- Particle effects
- Render pipelines
- Introduction to render pipelines
- Scriptable Render Pipeline fundamentals
- Choosing a render pipeline
- Rendering paths in Unity
- Using the Universal Render Pipeline
- Introduction to the Universal Render Pipeline
- Requirements and compatibility for URP
- What's new in URP 17 (Unity 6)
- Get started with URP
- Universal Render Pipeline fundamentals
- Installing and upgrading URP
- Creating a URP project
- Upgrading from the Built-In Render Pipeline to URP
- Upgrade URP
- Upgrade to URP 17 (Unity 6)
- Upgrade to URP 16 (Unity 2023.2)
- Upgrade to URP 15 (Unity 2023.1)
- Upgrade to URP 14 (Unity 2022.2)
- Upgrade to URP 13 (Unity 2022.1)
- Upgrade to URP 12 (Unity 2021.2)
- Upgrade to version 11.0.x of the Universal Render Pipeline
- Upgrade to version 10.1.x of the Universal Render Pipeline
- Upgrade to version 10.0.x of the Universal Render Pipeline
- Upgrade to version 9.0.x of the Universal Render Pipeline
- Upgrade to version 8.2.x of the Universal Render Pipeline
- Upgrade to version 8.1.x of the Universal Render Pipeline
- Upgrade to version 8.0.0 of the Universal Render Pipeline
- Upgrade to version 7.4.0 of the Universal Render Pipeline
- Upgrade to version 7.3.0 of the Universal Render Pipeline
- Upgrade to version 7.2.0 of the Universal Render Pipeline
- Upgrade from the Lightweight Render Pipeline to the Universal Render Pipeline
- Known issues in URP
- Configure for better performance in URP
- Graphics quality settings in URP
- Add anti-aliasing in the Universal Render Pipeline
- Custom rendering and post-processing in URP
- Introduction to Scriptable Render Passes in URP
- Adding pre-built effects via Renderer Features in URP
- Custom render pass workflow in URP
- Blit in URP
- Render graph system in URP
- Introduction to the render graph system in URP
- Write a render pass using the render graph system in URP
- Textures in the Render Graph system in URP
- Frame data in the render graph system in URP
- Draw objects in the render graph system in URP
- Compute shaders in the render graph system in URP
- Analyze a render graph in URP
- Optimize a render graph
- Use Compatibility Mode APIs in render graph render passes
- Render Graph Viewer window reference for URP
- Adding a Scriptable Render Pass to the frame rendering loop in URP
- Compatibility Mode in URP
- Universal Render Pipeline reference
- Using the High Definition Render Pipeline
- Using the Built-In Render Pipeline
- Post-processing
- Introduction to post-processing
- Post-processing effect availability reference
- Post-processing and full-screen effects in URP
- Post-processing in URP
- Introduction to post-processing in URP
- Add post-processing in URP
- Volumes in URP
- Post-processing Volume Overrides reference for URP
- Bloom Volume Override reference for URP
- Channel Mixer Volume Override reference for URP
- Chromatic Aberration Volume Override reference for URP
- Color Adjustments Volume Override reference for URP
- Color Curves Volume Override reference for URP
- Color Lookup Override reference for URP
- Depth of Field in URP
- Depth of Field Volume Override in URP
- Depth of Field Volume Override reference for URP
- Film Grain Volume Override reference for URP
- Lens Distortion Volume Override reference for URP
- Lift Gamma Gain Volume Override reference for URP
- Motion Blur Volume Override reference for URP
- Panini Projection Volume Override reference for URP
- Add screen space lens flares in URP
- Shadows Midtones Highlights Volume Override reference for URP
- Split Toning Volume Override reference for URP
- Tonemapping Volume Override reference for URP
- Vignette Volume Override reference for URP
- White Balance Volume Override reference for URP
- Custom post-processing in URP
- Create a low-code custom post-processing effect in URP
- Create a custom post-processing effect with Volume support in URP
- Full Screen Pass Renderer Feature reference for URP
- Creating a full-screen shader in Shader Graph in URP
- Fullscreen Master Stack reference for Shader Graph in URP
- Fullscreen Master Stack in Shader Graph reference for URP
- Programming in Unity
- Get started with programming in Unity
- Environment and tools
- Object-oriented development
- Managing time and frame rate
- Instantiating prefabs at runtime
- Handling events
- Splitting tasks across frames
- Interacting with web servers
- Adding functionality to objects at runtime
- Moving objects with vectors
- Rotation and oriention with quaternion
- Using common math functions
- Using randomness
- Gizmos and Handles
- Null references
- Unity attributes
- Compilation and code reload
- Script compilation
- Scripting backends
- Code and scene reload on entering Play mode
- Running project code on Editor launch
- Script serialization
- Integrating third-party code libraries (plug-ins)
- Code optimization
- Debugging and diagnostics
- Optimization
- Memory in Unity
- Unity Profiler
- Profiler introduction
- Collect performance data
- Collect performance data introduction
- Connecting the Profiler to a data source
- Data visualization
- CPU performance data
- Memory performance data
- File Access Profiler module reference
- GPU Usage Profiler module
- Highlights Profiler module reference
- Play mode and Editor profile samples
- Instrument all function calls
- Navigating the Profiler window
- Adding profiling information to your code
- Running the Profiler in its own process
- Profiler window reference
- Profiler Preferences reference
- Profiler command line arguments
- Profiler markers reference
- Profiler counters reference
- Profiling tools
- Understanding optimization in Unity
- Graphics performance and profiling
- Reduce rendering work on the CPU or GPU
- Optimizing draw calls
- Profile rendering
- Graphics performance and profiling in URP
- Understand performance in URP
- Analyze your project in URP
- Reducing rendering work on the CPU or GPU in URP
- Optimizing draw calls in URP
- Scriptable Render Pipeline (SRP) Batcher in URP
- BatchRendererGroup API in URP
- Introduction to the BatchRendererGroup API in URP
- Set up your project for the BatchRendererGroup API in URP
- Creating a renderer with the BatchRendererGroup API in URP
- Writing custom shaders for the BatchRendererGroup API
- DOTS Instancing shaders in URP
- Support DOTS Instancing in a a custom shader in URP
- Declare DOTS Instancing properties in a custom shader in URP
- Access DOTS Instancing properties in a custom shader
- Best practice for DOTS Instancing shaders in URP
- DOTS Instancing shader examples in URP
- DOTS Instancing shader macros reference for URP
- DOTS Instancing shader functions reference for URP
- Rendering Debugger in URP
- Graphics performance and profiling in the Built-In Render Pipeline
- Creating custom shaders that support GPU instancing in the Built-In Render Pipeline
- GPU Instancing in the Built-In Render Pipeline
- Add per-instance properties to GPU instancing shaders in the Built-In Render Pipeline
- Examples of GPU instancing shaders in the Built-In Render Pipeline
- Prevent Unity stripping GPU instancing shaders in the Built-In Render Pipeline
- GPU instancing shader reference for the Built-In Render Pipeline
- Creating custom shaders that support GPU instancing in the Built-In Render Pipeline
- Graphics performance and profiling reference
- Building and publishing
- Unity Services
- Unity IAP
- Setting up Unity IAP
- Cross Platform Guide
- Codeless IAP
- Defining products
- Subscription Product support
- Initialization
- Browsing Product Metadata
- Initiating Purchases
- Processing Purchases
- Handling purchase failures
- Restoring Transactions
- Purchase Receipts
- Receipt validation
- Store Extensions
- Cross-store installation issues with Android in-app purchase stores
- Store Guides
- Implementing a Store
- Unity IAP
- Troubleshooting
- Glossary
- The Editor interface
- Project Settings
- Physics 2D reference
Physics 2D reference
The following Project settingsA broad collection of settings which allow you to configure how Physics, Audio, Networking, Graphics, Input and many other areas of your project behave. More info
See in Glossary manage the global settings for Physics 2D, which define the limits on the accuracy of the physics simulation of 2D GameObjectsThe fundamental object in Unity scenes, which can represent characters, props, scenery, cameras, waypoints, and more. A GameObject’s functionality is defined by the Components attached to it. More info
See in Glossary in the Unity physics system. A more accurate simulation requires more processing overhead, and these settings allow you to adjust the trade-off between accuracy and performance that best suits your project.
To open the Physics 2D project settings window, go to Edit > Project Settings… > Physics 2D to manage the global Project settings for Physics 2D
Note: To manage the global settings for 3D physics instead, refer to the Physics Project settings reference page.
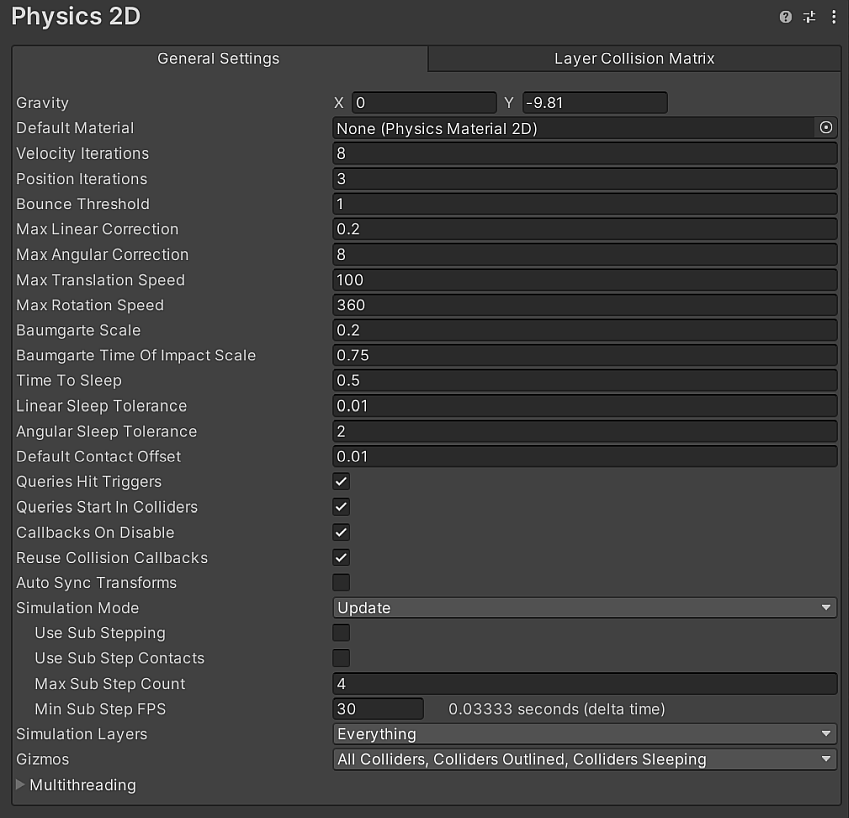
General Settings tab
The following are the properties available in the General Settings tab of the Physics 2D manager window.
| Property | Function |
|---|---|
| Gravity | Set the amount of gravity applied to all Rigidbody 2D GameObjects. Usually you only set gravity for the negative direction of the y-axis. |
| Default Material | Set a reference to the Physics Material 2DUse to adjust the friction and bounce that occurs between 2D physics objects when they collide More info See in Glossary to use if none has been assigned to an individual ColliderAn invisible shape that is used to handle physical collisions for an object. A collider doesn’t need to be exactly the same shape as the object’s mesh - a rough approximation is often more efficient and indistinguishable in gameplay. More info See in Glossary 2D. |
| Velocity Iterations | Set the number of iterations made by the physics system to resolve velocity effects. Higher numbers result in more accurate physics calculations but the Editor requires more CPU time. |
| Position Iterations | Set the number of iterations made by the physics system to resolve position changes. Higher numbers result in more accurate physics calculations but also requires more CPU time. |
| Bounce Threshold | Set the threshold for elastic collisionsA collision occurs when the physics engine detects that the colliders of two GameObjects make contact or overlap, when at least one has a Rigidbody component and is in motion. More info See in Glossary. Unity treats any collisions with a relative linear velocity below this threshold as inelastic, so no bounce will occur. |
| Max Linear Correction | Set the maximum linear position correction used when solving constraints (from a range between 0.0001 to 1000000). This helps to prevent overshooting. |
| Max Angular Correction | Set the maximum angular correction used when solving constraints (from a range between 0.0001 to 1000000). This helps to prevent overshooting. |
| Max Translation Speed | Set the maximum linear speed of a RigidbodyA component that allows a GameObject to be affected by simulated gravity and other forces. More info See in Glossary 2D GameObject during any physics update. |
| Max Rotation Speed | Set the maximum rotation speed of a Rigidbody 2D GameObject during any physics update. |
| Baumgarte Scale | Set the scale factor that determines how fast Unity resolves collision overlaps. |
| Baumgarte Time of Impact Scale | Set the scale factor that determines how fast Unity resolves time-of-impact overlaps. |
| Time to Sleep | Set the time (in seconds) that must pass after a Rigidbody 2D stops moving before it goes to sleep. |
| Linear Sleep Tolerance | Set the linear speed below which a Rigidbody 2D goes to sleep after the Time to Sleep elapses. |
| Angular Sleep Tolerance | Set the rotational speed below which a Rigidbody 2D goes to sleep after Time to Sleep elapses. |
| Default Contact Offset | Set a proximity distance value for Colliders to be considered in contact, even when they aren’t actually in contact. Colliders whose distance is less than the sum of their contactOffset values generate contacts, which causes the collision detection system to predictively enforce the contact constraint even when the objects are slightly separated. Caution: Reducing this value too far can slow down Unity’s ability to calculate continuous polygon collisions. Conversely, increasing the value too much might create artifacts for vertex collisions. |
| Simulation Mode | Select when Unity executes the 2D physics simulation.
|
| Simulation Layers | Select which layer(s) Unity simulates when Simulation Mode is set to FixedUpdate or Update.
|
| Queries Hit Triggers | Enable this option if you want Collider 2Ds marked as Triggers to return a hit when any physics query (such as Linecasts or Raycasts) intersects with them. Defaults to enabled. |
| Queries Start In Colliders | Enable this option if you want physics queries that start inside a Collider 2D to detect the Collider they start in. |
| Callbacks On Disable | Enable this option to produce collision callbacks when a Collider with contacts is disabled. |
| Reuse Collision Callbacks | Enable this setting to have the physics system reuse a single Collision2D instance for all collision callbacks. Disable to have the physics system create a new Collision2D instance for each collision callback instead. |
| Auto Sync Transforms | Enable this option to automatically sync transform changes with the physics system. |
| Gizmos | Select the types of physics 2D gizmos to be drawn within the Editor. You may select multiple options.
|
| Multithreading | Expand this to adjust the multithreading settings. Refer to Multithreading for information about each property. |
Simulation Mode: Update
The followings properties are visible only when you select Update or Script for the Simulation Mode.

| Property | Function |
|---|---|
| Use Sub Stepping | Enable this property to have the Editor use simulation sub-stepping during the simulation step. |
| Use Sub Step Count | Enable this property to have the Editor calculate contacts for all simulation sub-steps. This provides a more exact simulation for each sub-step but will reduce performance. Disable this property to only calculate contacts for the first simulation sub-step. |
| Max Sub Step Count | Sets the maximum number of simulation sub-steps allowed per-frame when simulation sub-stepping is enabled and actively running. This will also limit the amount of time the Editor spends on sub-stepping. |
| Min Sub Step FPSSee first person shooter, frames per second. See in Glossary |
Sets the minimum frames-per-second allowed for a simulation step before the Editor begins to use sub-stepping. When the current frame rate is lower than this value, the Editor will use simulation sub-stepping if Use Sub Stepping is enabled. |
Multithreading
The settings in the Multithreading section allow you to use the C# Job System to configure multithreaded physics.
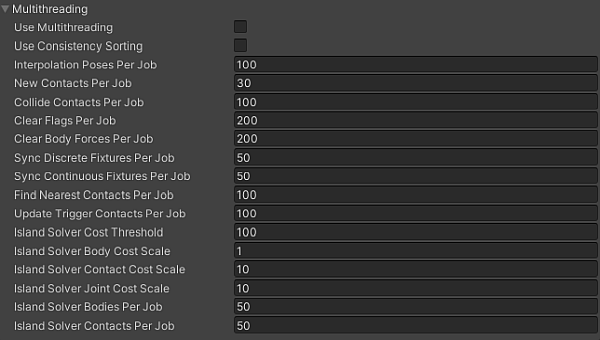
| Property | Function |
|---|---|
| Use Multithreading | Enable this option to execute the simulation steps using the job system and use the rest of these options to control how to achieve that. |
| Use Consistency Sorting | Enable this option if maintaining a consistent processing order becomes important to the simulation. Executing simulation steps on multiple CPU threads produces separate batches of data. Processing these separate batches reduces determinism in processing order, although produces faster results. |
| Interpolation Poses Per Job | Set the minimum number of Rigidbody 2D objects being interpolated in each simulation job. |
| New Contacts Per Job | Set the minimum number of new contacts to find in each simulation job. |
| Collide Contacts Per Job | Set the minimum number of contacts to collide in each simulation job. |
| Clear Flags Per Job | Set the minimum number of flags to be cleared in each simulation job. |
| Clear Body Forces Per Job | Set the minimum number of bodies to be cleared in each simulation job. |
| Sync Discrete Fixtures Per Job | Set the minimum number of fixtures to synchronize in the broadphase during discrete island solving in each simulation job. |
| Sync Continuous Fixtures Per Job | Set the minimum number of fixtures to synchronize in the broadphase during continuous island solving in each simulation job. |
| Find Nearest Contacts Per Job | Set the minimum number of nearest contacts to find in each simulation job. |
| Update Trigger Contacts Per Job | Set the minimum number of trigger contacts to update in each simulation job. |
| Island Solver Cost Threshold | Set the minimum threshold cost of all bodies, contacts and joints in an island during discrete island solving. |
| Island Solver Body Cost Scale | Set the cost scale of each body during discrete island solving. |
| Island Solver Contact Cost Scale | Set the cost scale of each contact during discrete island solving. |
| Island Solver Joint Cost Scale | Set the cost scale of each joint during discrete island solving. |
| Island Solver Bodies Per Job | Set the minimum number of bodies to solve in each simulation job when performing island solving. |
| Island Solver Contacts Per Job | Set the minimum number of contacts to solve in each simulation job when performing island solving. |
Layer Collision Matrix tab
The Layer Collision Matrix tab settings control whether Colliders (attached to different Rigidbody 2Ds) can come into contact which each other, based on the Layer assigned to the GameObject they are on. The matrix displays each Layer against every other Layer, allowing you to select which specific Layers can come into contact with another.
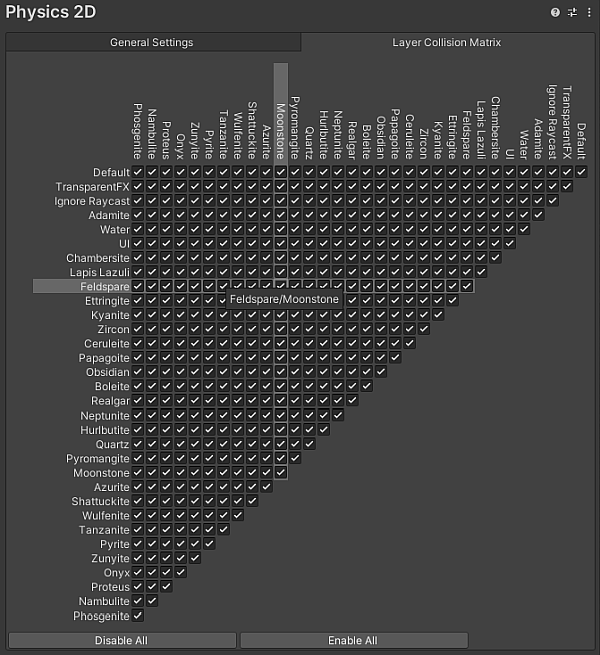
A check mark at the intersection between two Layers indicates that contact is allowed between those two Layers, while a cleared checkbox indicates that contact between those two Layers is never allowed. When you hover over a Layer’s name or a checkbox, its row and column are highlighted to make it easier to see which Layers its affects.
Tip: To optimize for the best possible performance, you should ensure that only the minimum number of potential contacts are selected by only selecting the specific Layers that you want to have contact with others, and disabling all other unnecessary contacts. To help with this, you can select Disable All or Enable All to quickly select or deselect all options at once. and then select the specific Layers.
Additional resources
Physics2DManager
Did you find this page useful? Please give it a rating:
Thanks for rating this page!
What kind of problem would you like to report?
Thanks for letting us know! This page has been marked for review based on your feedback.
If you have time, you can provide more information to help us fix the problem faster.
Provide more information
You've told us this page needs code samples. If you'd like to help us further, you could provide a code sample, or tell us about what kind of code sample you'd like to see:
You've told us there are code samples on this page which don't work. If you know how to fix it, or have something better we could use instead, please let us know:
You've told us there is information missing from this page. Please tell us more about what's missing:
You've told us there is incorrect information on this page. If you know what we should change to make it correct, please tell us:
You've told us this page has unclear or confusing information. Please tell us more about what you found unclear or confusing, or let us know how we could make it clearer:
You've told us there is a spelling or grammar error on this page. Please tell us what's wrong:
You've told us this page has a problem. Please tell us more about what's wrong:
Thank you for helping to make the Unity documentation better!
Your feedback has been submitted as a ticket for our documentation team to review.
We are not able to reply to every ticket submitted.
Copyright ©2005-2025 Unity Technologies. All rights reserved. Built from 6000.1.0b13 (76d4f0203a02). Built on: 2025-03-21.