Sweep-based CCD
Sweep-based CCD is the CCD algorithm for the Continuous and Continuous Dynamic modes.
Use Continuous on physics bodies that only collide with stationary static collidersAn invisible shape that is used to handle physical collisions for an object. A collider doesn’t need to be exactly the same shape as the object’s mesh - a rough approximation is often more efficient and indistinguishable in gameplay. More info
See in Glossary (that is, GameObjects that don’t have a Rigidbody).
Use Continuous Dynamic on physics bodies that collide with moving dynamic colliders (that is, GameObjects that have a dynamic Rigidbody).
Continuous and Continuous Dynamic are the most accurate collisionA collision occurs when the physics engine detects that the colliders of two GameObjects make contact or overlap, when at least one has a Rigidbody component and is in motion. More info
See in Glossary detection modes. However, they are also the most computationally demanding. In addition, they only work for collisions that occur as a result of linear movement; they can’t detect collisions that occur as a result of the physics body rotating (for example, a pinball flipper colliding with a ball when it rotates on its pivot).
Understand sweep-based CCD
Sweep-based CCD uses a Time-Of-Impact (TOI) algorithm to compute potential collisions. To do this, the algorithm “sweeps” or detects along the object’s forward trajectory at the object’s current velocity.
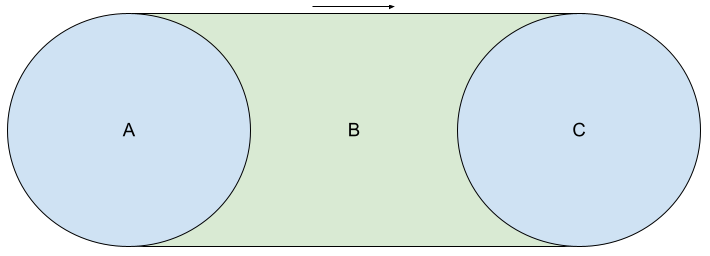
In the above image:
- A: Object at starting position
- B: Predicted area that the object will pass through between now and the next timestep, based on the object’s current velocity
- C: Object at new position after one physics timestep
If there are contacts along the object’s moving direction, the algorithm computes the time of impact, and moves the object until that time. The algorithm can perform sub-steps from that time onwards; most importantly, it can re-compute the velocity after impact and then re-sweep at the new trajectory.
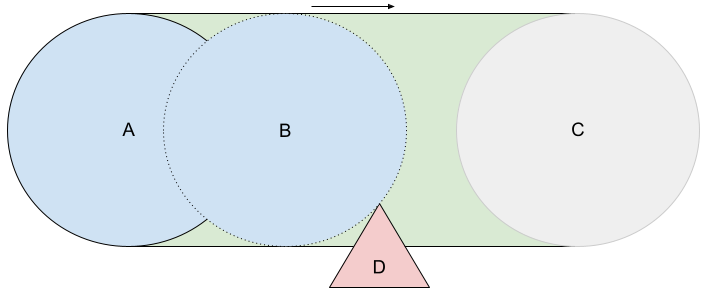
In the above image:
- A: Object at starting position
- B: Object in position at which the sweep-based CCD algorithm predicts a collision
- C: Original predicted position after one physics timestep
- D: Collider interrupting the linear path, detected by the sweep-based CCD algorithm
Sweep-based CCD can have a significant impact on performance, especially when widely used in a project. If a large number of high-speed objects with sweep-based CCD are in close proximity, the CCD overhead increases quickly because the physics engineA system that simulates aspects of physical systems so that objects can accelerate correctly and be affected by collisions, gravity and other forces. More info
See in Glossary has to perform more sweeps, and more CCD sub-steps.
A limitation of sweep-based CCD is that it can only carry out a linear (or directional) sweep, and not an angular (or rotational) sweep, which means it cannot predict collisions that might happen if the physics body rotates. For example, the flipper in a pinball machine is fixed at one end and rotates around a fixed point; it only has angular motion, and no linear motion. If you also need to account for an object’s rotation, use speculative CCD.