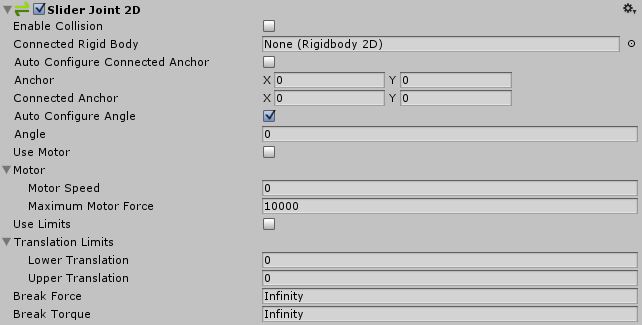
Slider Joint 2D
El componente Slider Joint 2D le permite a un objeto Sprite controlado por física de rigidbody de deslizarse a lo largo de una linea en el espacio. El objeto puede opcionalmente ser dejado libre de moverse a lo largo de la linea en respuesta a colisiones o fuerzas. Éste también puede ser movido a lo largo por una fuerza de motor y tener limites aplicados para mantener su posición con cierta sección de la linea.
| Propiedad: | Función: |
|---|---|
| Enable Collision | Pueden los dos objetos conectados colisionar el uno con el otro? |
| Connected Rigid Body | Specify here the other object this joint connects to. Leave this as None and the other end of the joint will be fixed at a point in space defined by the Connected Anchor setting. Select the circle to the right of the field to view a list of objects to connect to. |
| Auto Configure Connected Anchor | Check this box to automatically set the anchor location for the other object this joint connects to. (Check this instead of completing the Connected Anchor fields.) |
| Anchor | The place (in terms of X, Y co-ordinates on the RigidBody) where the end point of the joint connects to this object. |
| Connected Anchor | The place (in terms of X, Y co-ordinates on the RigidBody) where the end point of the joint connects to the other object. |
| Auto Configure Angle | Check this box to automtically detect the angle between the two objects and set it as the angle that the joint keeps between the two objects. (By selecting this, you don’t need to manually specify the angle.) |
| Angle | Enter the the angle that the joint keeps between the two objects. |
| Use Motor | Use the sliding motor? Check the box for yes. |
| Motor | |
| Motor Speed | La velocidad deseada del motor (unidades/segundos) |
| Maximum Motor Force | La fuerza máxima la cual puede ser aplicada por el motor mientras intenta alcanzar la velocidad deseada. |
| Use Limits | Should there be limits to the linear (straight line) force? Check the box for yes. |
| Translation Limits | |
| Lower Translation | La distancia minimal del objeto rigidbody la cual puede ser desde el punto de anclaje conectado |
| Upper Translation | La distancia máxima la cual el objeto rigidbody puede estar desde el punto de anclaje conectado. |
| Break Force | Specify the linear (straight line) force level needed to break and so delete the joint. Infinity means it is unbreakable. |
| Break Torque | Specify the torque (rotation) level needed to break and so delete the joint. Infinity means it is unbreakable. |
Detalles
(See also Joints 2D: Details and Hints for useful background information on all 2D joints.)
Use this joint to make objects slide! The aim of this joint is to maintain the position of two points on a configurable line that extends to infinity. Those two points can be two Rigidbody2D components or a Rigidbody2D component and a fixed position in the world. (Connect to a fixed position in the world by setting Connected Rigidbody to None).
The joint applies a linear force to both connected rigid body objects to keep them on the line. It also has a simulated linear motor that applies linear force to move the ridid body objects along the line. You can turn the motor off or on. Athough the line is infinite, you can specify just a segment of the line that you want to use, using the Translation Limits option.
This joint has three simultaneous constraints. All are optional:
- Maintain a relative linear distance away from a specified line between two anchor points on two rigid body objects.
- Maintain a linear speed between two anchor points on two rigid body objects along a specified line. (The speed is limited with a maximum force.)
- Maintain a linear distance between two points along the specified line.
For Example:
You can use this joint to construct physical objects that need to react as if they are connected together on a line. Such as:
- A platform which can move up or down. The platform reacts by moving down when something lands on it but must never move sideways. You can use this joint to ensure platform to never moves up or down beyond certain limits. Use the motor to make the platform move up.