Hinge Joint 2D
El componente Hinge Joint 2D le permite a un objeto Sprite controlado por física del rigidbody de ser adjuntado a un punto en el espacio alrededor el cual pueda gira. La rotación puede ser que se deje a que sea pasiva (en respuesta a una colisión, digamos) o activamente alimentada por un motor torque proporcionado por la articulación en sí misma. El hinge puede también ser configurado con limites para prevenir de que haga un giro completo.
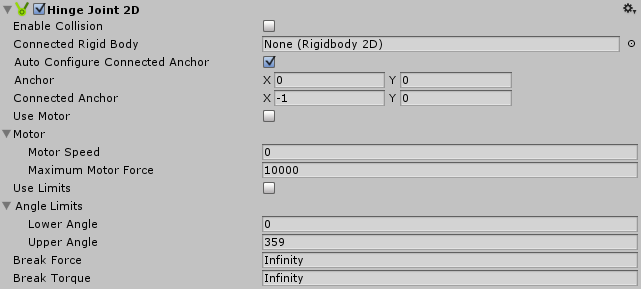
Propiedades
| Propiedad: | Función: |
|---|---|
| Enable Collision | Pueden los dos objetos conectados colisonar el uno con el otro? |
| Connected Rigid Body | Specify here the other object this joint connects to. Leave this as None and the other end of the joint will be fixed at a point in space defined by the Connected Anchor setting. Select the circle to the right of the field to view a list of objects to connect to. |
| Auto Configure Connected Anchor | Check this box to automatically set the anchor location for the other object this joint connects to. (Check this instead of completing the Connected Anchor fields.) |
| Anchor | The place (in terms of X, Y co-ordinates on the RigidBody) where the end point of the joint connects to this object. |
| Connected Anchor | The place (in terms of X, Y co-ordinates on the RigidBody) where the end point of the joint connects to the other object. |
| Motor | |
| Use Motor | Debería el motor hinge estar activado? |
| Motor Speed | La velocidad del motor deseada (grados/segundos). |
| Maximum Motor Force | El torque máximo el cual el puede aplicar mientras intente alcanzar la velocidad deseada. |
| Use Limits | Debería el ángulo de rotación ser limitada? |
| Angle Limits | |
| Lower Angle | El extremo inferior del arco de rotación permitido por el límite. |
| Upper Angle | El extremo superior del arco de rotación permitido por el límite. |
| Break Force | Specify the linear (or straight line) force level needed to break and so delete the joint. Infinity means it is unbreakable. |
| Break Torque | Specify the the angular (or rotation) level needed to break and so delete the joint. Infinity means it is unbreakable. |
Detalles
(See also Joints 2D: Details and Hints for useful background information on all 2D joints.)
El nombre del hinge join implica algo como un hinge de puerta (y puede con seguridad ser usado para implementar eso) pero se refiere de manera más general a cualquier cosa que gire alrededor de un punto en particular. Puede ser utilizado para partes de maquina, ruedas motorizadas, péndulos y muchas cosas más similares.
You can use this joint to make two points overlap. Those two points can be two Rigidbody2D components or a Rigidbody2D component and a fixed position in the world. (Connect to a fixed position in the world by setting Connected Rigidbody to None). The joint applies a linear force to both connected rigid body objects.
The joint has a simulated rotational motor which you can turn on or off. Set the Maximum Motor Speed and Maximum Motor Force to control the angular speed (Torque), and make the two rigid body objects rotate in an arc relative to each other. Set the limits of the arc using Lower Angle and Upper Angle.
Hinge Joint 2D has three simultaneous constraints. All are optional:
- Maintain a relative linear distance between two anchor points on two rigid body objects.
- Maintain an angular speed between two anchor points on two rigid body objects (limited with a maximum torque in Maximum Motor Force .
- Maintain an angle within a specified arc.
For Example:
You can use this joint to construct physical objects that need to react as if they are connected with a rotational pivot. Such as:
- A see-saw pivot where the horizontal section is connected to the base. (Use the joint’s Angle Limits to simulate the highest and lowest point of the see-saw’s movement.)
- A pair of scissors connected together with a hinge pivot. (You can use the joint’s Angle Limits to simulate the closing and maximum opening of the scisssors.)
- A simple wheel connected to the body of a car with the pivot connecting the wheel at its center to the car. (In this example you can use the joint’s motor to rotate the wheel.)