Hinge Joint
El Hinge Joint agrupa dos Rigidbodies, restringiendo su movimiento para que se muevan como si estuvieran conectados por un bisagra. Es perfecto para puertas, pero también puede ser utilizado para modela cadenas, péndulos, etc.
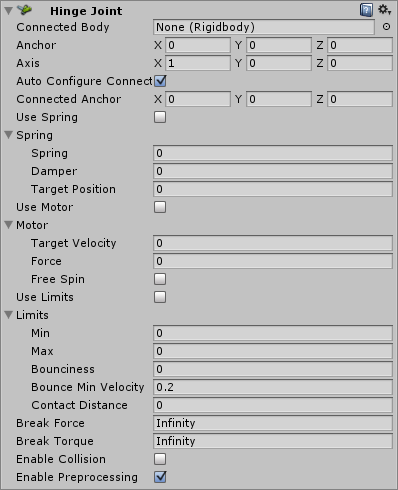
Propiedades
| Propiedad: | Función: |
|---|---|
| Connected Body | Referencia opcional al Rigidbody el cual la articulación depende. Si no está configurada, la articulación conecta al mundo. |
| Anchor | La posición del eje alrededor el cual el cuerpo oscila. La posición está definida en el espacio local. |
| Axis | La dirección del eje alrededor el cual el cuerpo oscila. La dirección está definida en espacio local. |
| Auto Configure Connected Anchor | Si esto está activado, luego la posición Connected Anchor será calculada automáticamente para que encaje la posición global de la propiedad de anclaje. Este es el comportamiento por defecto. Si este está desactivado, usted puede configurar la posición del anclaje conectado manualmente. |
| Connected Anchor | Configuración manual de la posición de anclaje conectada. |
| Use Spring | Spring hace que el rigidbody llegue a un ángulo especifico comparado a su cuerpo conectado. |
| Spring | Propiedades del Spring que son utilizados si Use Spring está activado. |
| Spring | La fuerza que el objeto hace para moverse en posición. |
| Damper | Entre mayor sea este valor, más lento se pondrá el objeto. |
| Target Position | El ángulo deseado del spring (resorte). El spring jala hacia este ángulo medido en grados. |
| Use Motor | EL motor hace que el objeto gire alrededor. |
| Motor | Propiedades del motor que es usado si Use Motor está activado. |
| Target Velocity | La velocidad la cual el objeto intenta alcanzar. |
| Force | La fuerza aplicada con el fin de alcanzar la velocidad |
| Free Spin | Si es activado, el motor nunca es utilizado para frenar el giro, solamente para acelerarlo. |
| Use Limits | Si es activado, el ángulo de la bisagra va a ser restringida dentro de los valores Min & Max. |
| Limits __ |Propiedades de los Limites que son utilizados si Use Limits está activado. | | Min__ | El ángulo mas pequeño el cual la rotación puede llegar |
| Max | El ángulo mayor el cual la rotación puede llegar. |
| Bounciness | Qué tanto el objeto rebota cuando llega a su parada minima. |
| Contact Distance | Dentro de la distancia de contacto del limite los contactos van a persistir con el fin de evitar la fluctuación de fase. |
| Break Force | La fuerza que necesita ser aplicada a esta articulación para que se rompa. |
| Break Torque | El torque que necesita ser aplicado a esta articulación para que rompa. |
| Enable Collision | Cuando está marcado, esto activa colisiones entre cuerpos conectadas con una articulación. |
| Enable Preprocessing | Des-habilitar el pre-procesamiento ayuda estabilizar configuraciones imposibles de cumplir. |
Detalles
Un solo Hinge Joint debería ser aplicado a un GameObject. La bisagra va a girar en el punto especificado por la propiedad Anchor, moviéndose alrededor de la propiedad Axis especifica. Usted no necesita asignar un Gameobject a la propiedad Connected Body de la articulación. Usted debería solamente asignar un GameObject a la propiedad Connected Body si usted quiere que el Transform de la articulación sea dependiente al transform del objeto adjunto.
Piense acerca de cómo la bisagra de la puerta funciona. El Transform en este caso está arriba, en el lado positivo del eje Y. El Anchor está colocado en algún lado en la intersección entre la puerta y la pared. Usted no va a necesitar asignarle la pared al Connected Body, debido a que la bisagra estará conectada al mundo por defecto.
Ahora piense en la bisagra de la puerta de un perrito. El Axis de la puerta del perrito estaría de lado, positivamente a lo largo del eje x relativo. La puerta principal debería estar asignada como el Connected Body, por lo que la bisagra de la puerta del perrito depende del Rigidbody de la puerta principal.
Cadenas
Multiples Hinge Joints pueden también ser encadenados para crear una cadena. Agregue una articulación a cada vinculo en la cada, y adjunte el siguiente vinculo como Connected Body.
Consejos
- Usted no necesita asignar un Connected Body a su articulación para que funcione.
- Utilice Break Force con el fin de realizar sistemas de daños dinámicos. Esto es muy bueno ya que le permite al jugador romper una puerta por su bisagra al dispararle un lanza cohetes o que un carro pase por ella.
- Las propiedadSpring, Motor, y Limits le permite a usted ajustar el comportamiento de sus articulación.
- El uso de Spring, Motor están intencionados para que sean mutuamente excluyentes. Utilizando ambos al mismo tiempo lleva a resultados impredecibles.