Point Effector 2D
Point Effector 2D は、剛体の位置や、エフェクターが使用するコライダーの中心によって定義される発生源に反発して、引き付ける/跳ね返す ための力を設定します。他の(ターゲットとなる)コライダーのエフェクターが接触した場合、ターゲットにフォースが与えられます。どこでフォースが与えられ、どのように計算されるかを制御できます。
エフェクターとともに使用する Colliders は普通、トリガーとして設定できるので、フォースを適用させるために、他のコライダーを重ねる事ができます。トリガー無しでも機能しますが、フォースはコライダーが接触したときのみ適用されます。
プロパティー
| プロパティー | 機能 |
|---|---|
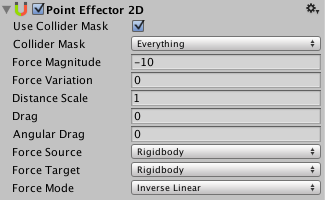
| Use Collider Mask | Collider Mask プロパティーを使用するか。チェックを外している場合、グローバルコリジョンマトリクスがデフォルトのものとしてすべてのコライダーに使用されます。 |
| Collider Mask | マスクはエフェクターを作用させるレイヤーを指定するのに使用します。 |
| Force Magnitude | 適用する力の大きさ |
| Force Variation | 適用される力の大きさの範囲 |
| Distance Scale | ソースと対象間で距離に適用されるスケール。距離を計算する際にこの値をかけ合わせ、適用する力の量を管理するのに効果的な距離の変更を可能にします。 |
| Drag | リジッドボディに適用する Linear Drag の値 |
| Angular Drag | リジッドボディに適用する Angular Drag |
| Force Source | Force Source は対象オブジェクトを引き付けたり、反発する点です。対象からの距離はこの点を元に定義されます。 |
| Collider | ソースポイントはコライダーの現在の位置を使用して定義されます。 |
| Rigidbody | ソースポイントはリジッドボディの現在の位置を使用して定義されます。 |
| Force Target | Force Target はエフェクターがなんらかの力を適用する対象オブジェクト上の点です。ソースへの距離はこの点を元に定義されます。 |
| Collider | ターゲットポイントはコライダーの現在の位置を使用して定義されます。コライダーが centerOfMass の中心にない場合、この方式で力を適用するとトルク(ターゲットの回転要因)を生成することができます。 |
| Rigidbody | ターゲットポイントはリジッドボディの現在の centerOfMass を使用して定義されます。この方式で力を適用するとトルク(ターゲットの回転要因)は生成されません。 |
| Force Mode | 力をどのように計算するか。 |
| Constant | ソースとターゲットの距離に関係なく力を適用します。 |
| Inverse Linear | ソースとターゲット間の逆直線距離の機能を用いて力を適用します。ソースとターゲットが同じ位置にある場合に力をすべて適用し、離れるにつれて直線的に弱まります。 |
| Inverse Squared | ソースとターゲット間の逆二乗距離の機能を用いて力を適用します。ソースとターゲットが同じ位置にある場合に力をすべて適用し、離れるにつれて2乗的に弱まります。これは現実世界の重力と同様です。 |