自适应探针体积简介
Adaptive Probe Volume 是 Unity 根据场景中的几何体密度自动放置的一组光照探针,用于创建烘焙的间接光照。借助自适应探针体积,您无需手动放置和配置光照探针。
优点和限制
| 功能 | 光照探针组 | 自适应探针体积 |
|---|---|---|
| 周围探针的选择 | 基于游戏对象 | 基于像素 |
| 通过流式传输优化内存使用 | 否 | 是 |
| 自动放置探针 | 否 | 是 |
| 不同烘焙之间的混合 | 否 | 是 |
| 手动放置探针 | 是 | 否 |
自适应探针体积具有以下优点:
- Unity 会基于像素对周围的探针进行采样,而不是基于游戏对象。这种采样方法可以提高光照一致性,同时减少相邻游戏对象之间的接缝。
- 可以调整场景中的光探针布局,例如在具有更详细的照明或几何形状的内部区域中使用更密集的光探针集。请参阅配置自适应探针体积的大小和密度以了解更多信息。
- 自适应探针体积适用于多场景。有关更多信息,请参阅烘焙集。
- 自适应探针体积包括流功能以支持大型开放世界。
- 您可以使用自适应探针体积在运行时使用天空遮挡来更新光线。
![]()
自适应探针体积具有以下限制:
- 您无法调整自适应探针体积内光探针的位置。您可以用设置和覆盖来尝试修复可见的伪影,但可能无法确保光源探针沿着墙壁或或精准位于不同照明区域之间的边界。有关更多信息,请参阅修复自适应探针体积问题。
- 无法将光照探针组转换为自适应探针体积。
自适应探针体积的工作原理
通用渲染管线 (URP) 会自动使用“砖块”的 3D 结构填充自适应探针体积。每个“砖块”包含 64 个光照探针,排列成 4×4×4 的网格。
URP 会使用不同大小的“砖块”,以匹配场景中不同区域的几何结构数量。例如,在具有更多几何体的区域中,URP 使用光照探针之间距离较短的砖块。光照探针以更高的分辨率捕获光照,因此光照更准确。
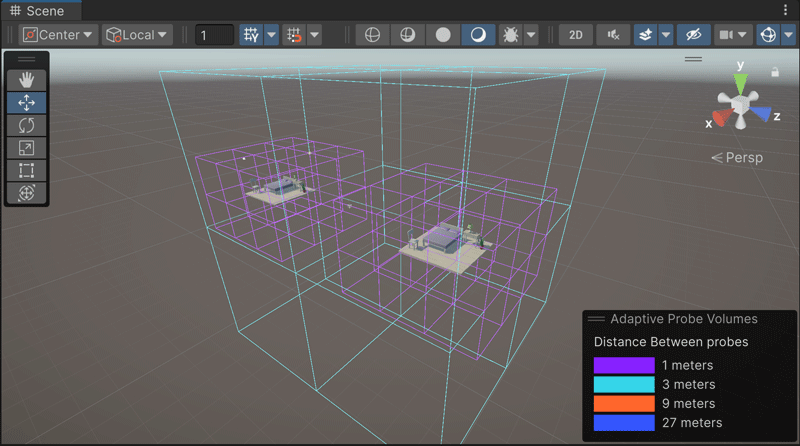
默认的光照探针间距为 1、3、9 或 27 米。
游戏对象的每个像素都会从其周围八个最近的光照探针中采样照明数据。
您可以执行以下操作:
- 使用渲染调试器来可视化砖块和光照探针的布局。请参阅显示自适应探针体积。
- 配置自适应探针体积的大小和密度。
- 向场景添加体积以调整光照探针游戏对象的采样。
烘焙集
若要将场景中的光照信息存储到自适应探针体积中,该场景必须是烘焙集的一部分。
一个烘焙集包含以下内容:
- 一个或多个场景,其中可以选择包括自适应探针体积。
- 单个设置集合。
默认情况下 URP 将使用单场景模式,并自动将每个场景放入其自己的烘焙集中。但是,在任何时候只能有一个烘焙集处于活动状态,因此,如果要处理多个场景,并且希望将它们一起烘焙,则必须将这些场景添加到单个烘焙集中。请参阅烘焙多个场景以了解更多信息。
光照场景
光照场景资源包含场景或烘焙集的烘焙光照数据。您可以将不同的光照设置烘焙到不同的光照场景资源中,并且在运行时更改 URP 所使用的光照场景,或在它们之间进行混合。
有关更多信息,请参阅使用光照场景烘焙不同光照设置。
光照场景如何存储数据
为避免数据重复,自适应探针体积将光照场景数据拆分为两部分:
- 共享数据,主要包含场景细分信息和探针放置信息。
- 基于场景的数据,其中包含探针照明信息。
如果在烘焙过程中移动了几何结构,URP 就无法在光照场景之间共享数据或混合,因为光照探针位置可能会发生变化。请参阅在不同光照场景中保持光照探针相同以了解更多信息。