在内置渲染管线中配置光照探针代理体
生成插值光照探针 3D 网格的区域受 包围盒模式 (Bounding Box Mode) 属性的影响。
局部自动 (Automatic Local) 与 世界自动 (Automatic World) 之间的主要区别在于,在 Automatic Local 中,大型层级视图中的游戏对象使用来自父游戏对象的相同 LPPV 组件时,包围盒的计算需要耗费更多资源。然而,生成的包围盒大小可能更小,这意味着光照数据更紧凑。
包围体内的插值光照探针的数量受 代理体分辨率 (Proxy Volume Resolution) 属性的影响。有两个选项:
自动 (Automatic)(默认值)- 使用指定的单位面积的插值光照探针数量以及包围盒大小来计算每个轴上的分辨率。
自定义 (Custom) - 允许在每个轴上指定不同分辨率(见下文)。
注意:每个轴上的最终分辨率必须是 2 的幂,并且分辨率的最大值为 32。
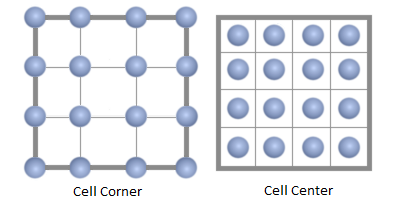
探针位置模式 (Probe Position Mode) 指定插值光照探针相对于单元格中心的位置。在某些插值光照探针穿过墙壁或其他几何体并导致光照泄漏时,此选项可能很有用。以下示例使用 4x4 网格分辨率来显示 2D 视图中的 单元格角落 (Cell Corner) 和 单元格中心 (Cell Center) 之间的区别:
数据格式 (Data Format) 指定关联的 3D 纹理使用的格式。有两个选项:
浮点 (Float)(默认值)- 纹理使用 32 位浮点通道格式来存储球谐函数系数。
半精度浮点 (Half Float) - 纹理使用半精度浮点(16 位浮点)通道格式来存储球谐函数系数。这种格式的优点是大多数设备都支持半浮点线性纹理采样,并且这种格式与 32 位浮点通道格式之间的精度差异不明显。此外,这种数据格式对于 GPU 上的纹理采样性能更好。