What's new in SensorSDK
What's new in SensorSDK 2.1
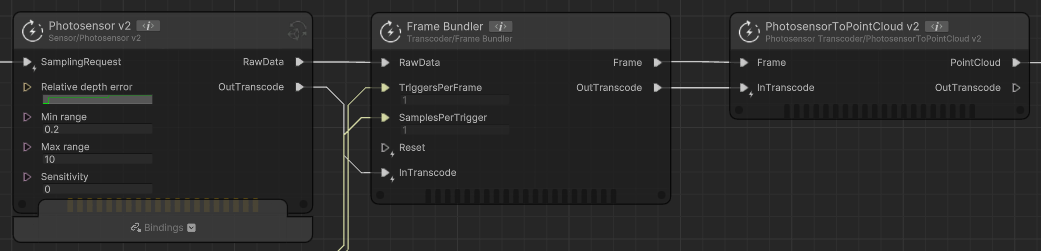
In release 2.1.0 of SensorSDK, multiple nodes related to the Photosensor and processing its output have been simplified, giving rise to a new set of nodes, denoted with the suffix v2, for example, Photosensor v2. The photosensor now outputs a structured buffer directly, instead of a circular buffer, which simplifies subsequent nodes as they don't have to handle a read index into the circular buffer.
A new Frame Bundler node accumulates samples from the Photosensor v2 node and outputs full sensor frames.
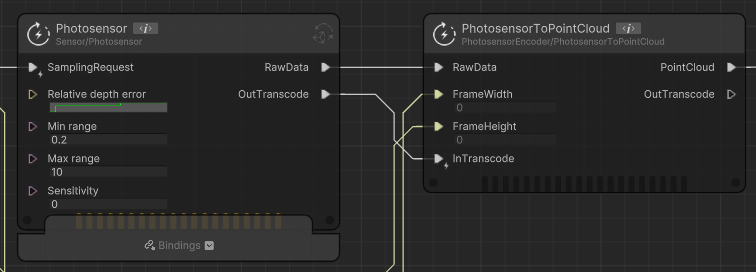
In SensorSDK 2.0.5, a lidar graph would look like this:
In SensorSDK 2.1.0, the same lidar now looks like this:
What's new in SensorSDK 2.0
Lidars
Lidars with field of view
The Lidar Controller node now has Horizontal FoV property to specify the azimuth angle covered by the lidar. This port is exposed as a property in the Generic 3D Lidar system graph.
A new Generic 3D Lidar with FoV prefab has been added.
Lidar segmentation

SensorSDK now integrates with the Perception package to provide segmentation support for lidars.
New nodes PhotosensorToInstanceSegmentation v2 and PhotosensorToSemanticSegmentation v2 generates segmentation images from the lidar output. See Lidar segmentation for details.
A new separate sample library, Perception library, is provided with the SensorSDK package. It comes with a Generic 3D Segmentation Lidar prefab and a corresponding demo scene.
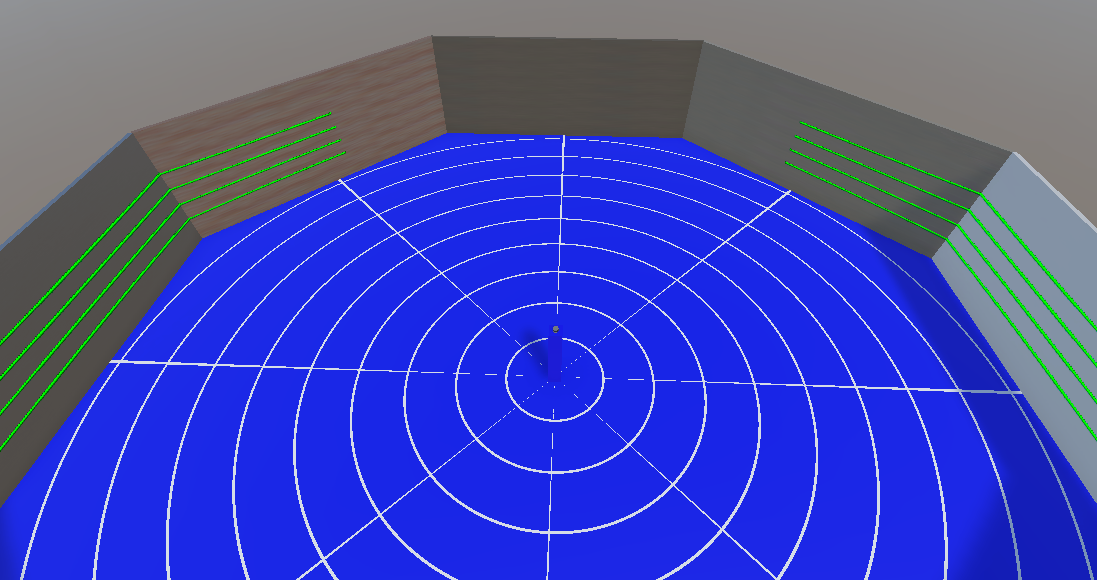
Lidar laser configuration

New laser configuration components allow to specify the orientation of each individual laser of a lidar for more accurate results. Laser configurations are saved as assets or imported from a JSON file.
The Ouster OS0-128 prefab uses a JSON file to specify the orientation of each laser.
Lidar firing sequence
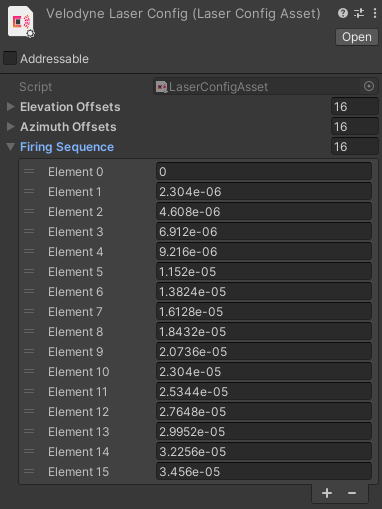
Laser configuration can also be used to specify the delay between firing each laser for more accurate results.
The Velodyne Puck prefab uses a laser configuration asset to specify the time at which each laser is fired.
Cameras
Fisheye Lens
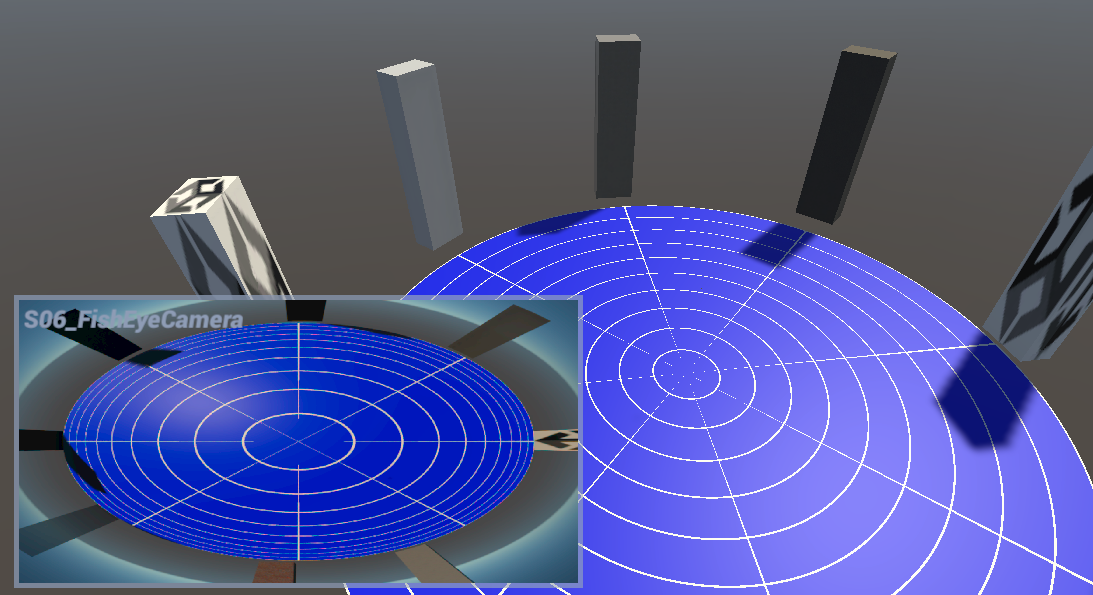
A new FishEyeLens component can now be attached to cameras to perform fisheye image projection, including lens distortion.
A new FishEyeCamera prefab is now available.
Camera automatic white balancing
The RGBCamera prefab now offers the ability to apply a color correction. Simply perform the automatic white balance procedure while the camera looks at a white surface.
Improved parallel stereo
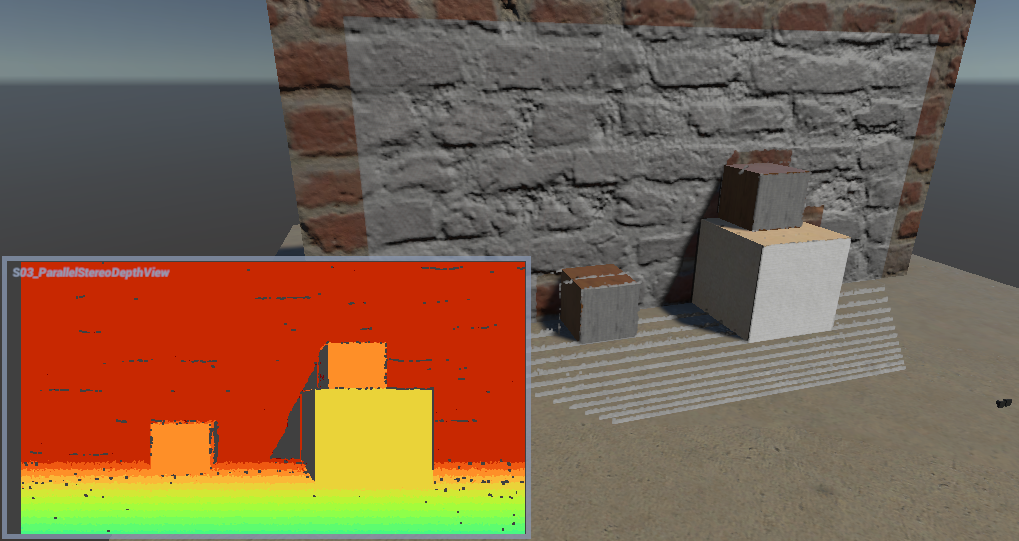
The Parallel stereo camera now uses a speckle filter to reduce noise in the point cloud output.
Miscellaneous
Easier install
SensorSDK can now be installed directly using the Package Manager. The custom installer and project template are not necessary anymore. Use the standard HDRP project template. This is possible because SensorSDK does not depend on a custom version of the graphics packages anymore.
Color mapping with LUTs
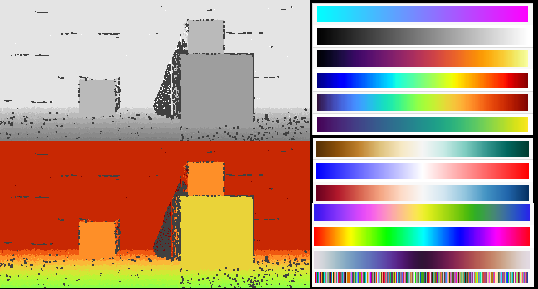
You can now use the new LUT Mapping node to map a grayscale image to a color-mapped version for better visualization. See Use LUT Mapping for visualization for the list of available LUTs.