Generic 3D Segmentation Lidar
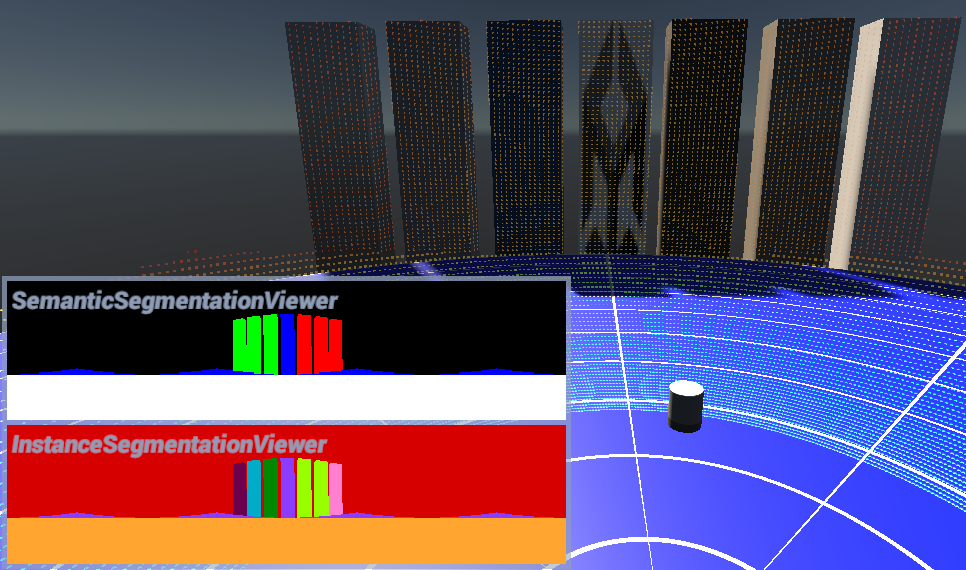
This lidar Prefab is based on the Generic 3D Lidar and demonstrates interoperability with the Perception package to perform instance segmentation and semantic segmentation using a lidar.
Refer to the Lidar segmentation page for details on how to perform segmentation using this lidar.
Note
You must install the Perception package in your project to perform lidar segmentation.
Note
You can import the Perception library from the SensorSDK samples to access a lidar prefab and a demo scene demonstrating lidar segmentation.
Warning
Installing the perception package and running it the first time may prompt an error regarding a misconfigured output endpoint. This error has no effect on the lidar segmentation. To remove the error: select Edit > Project Settings > Perception, and change the active endpoint to No Output Endpoint or Perception Endpoint.
Warning
Lidar segmentation requires a PathtracedSensingComponent. A Camera-Based Lidar solution isn't supported yet.
Implementation details
Warning
This sensor has a node that uses DXR and will not function without a compatible graphics card. See requirements for more details.
Refer to the Generic 3D Lidar page for implementation details.
Inputs
| Input | Description |
|---|---|
| SamplingRate | Defines the number of samples per second the photosensor must take. |
| RotationSpeedHz | The photosensor rotation speed represents the number of turns per second the object will rotate on itself around the Y axis. |
| MinRange | Sets the minimum range registered by the device. |
| MaxRange | Sets the maximum range registered by the device. Every sample outside the max range will have a distance of 0 meters. |
| sensitivity | Sets a minimum radiant energy threshold in watts/m^2. Under this threshold, the measurement is considered invalid. A threshold value of 0 means no threshold. |
| MotorSpeedVariation | The standard deviation of the motor speed. |
| MotorTimeConstant | The time required to reach 63% of the max RPM for the motor. |
| MotorTurnCW | When selected, indicates the motor turns clockwise. |
Outputs
| Output | Description |
|---|---|
| PointCloud | A render texture with the (x, y, z) position for each pixel. The lidar frame is spread from left to right in the texture. To know the point count, one can look at the count value in this structure. |
| Intensity | A corresponding render texture with the perceived intensity for each pixel. |
| OutTranscode | Provides a context for executing sampling custom passes, which then passes through the GPU processing pipeline. |
| InstanceSegmentation | A render texture with the instance labels, as floats. |
| SemanticSegmentation | A render texture with the semantic labels, as ARGB32 colors. |