Wheel Collider
Wheel Collider は、陸上車両用の特殊なコライダーです。組み込み衝突検出、ホイール物理特性、スリップベースのタイヤ摩擦モデルを含みます。ホイール以外のオブジェクトにも使用できますが、特にホイールのある車両向けに設計されています。
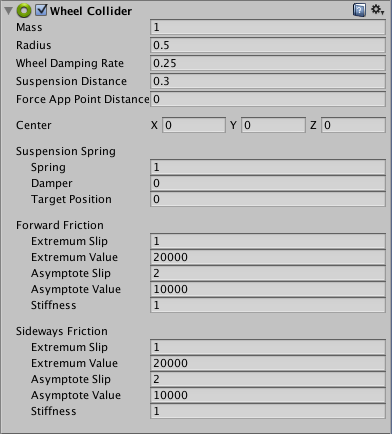
プロパティー
| プロパティー: | 説明: |
|---|---|
| Mass | ホイールの質量。 |
| Radius | ホイールの半径。 |
| Wheel Damping Rate | ホイールに適用される減衰値です。 |
| Suspension Distance | ホイールサスペンションの最大延長距離で、ローカル空間で測定されます。サスペンションは常にローカルの Y 軸を通じて下に伸びます。 |
| Force App Point Distance | このパラメーターは、ホイールの力が適用される位置を定義します。これは、ホイールの基準となる静止位置からメートル単位でサスペンションの進行方向に沿った期待値を設定します。「forceAppPointDistance = 0」のとき、力はホイールの基準となる静止位置で適用されます。一般的に車両の重心より少し下で適用します。 |
| Center | オブジェクトのローカル空間でのホイールの中心。 |
| Suspension Spring | サスペンションが、スプリングと減衰力を追加して、Target Position に達しようとします。 |
| Spring | スプリング力が Target Position に到達しようとします。値が大きいほど、サスペンションが Target Position に到達する速度が上がります。 |
| Damper | サスペンションの速度を減衰します。値が小さいほど Suspension Spring の速度が下がります。 |
| Target Position | Suspension Distance に沿ったサスペンションの残りの距離。1 は、完全に伸びきったサスペンションをマッピングし、0 は完全に縮まったサスペンションをマッピングします。デフォルトは 0.5 で、通常の車両のサスペンションの動作に一致します。 |
| Forward/Sideways Friction | Forward/Sideways Friction ホイールが前転や横転する際のタイヤの摩擦のプロパティー。下記の Wheel Friction Curve を参照してください。 |
詳細
ホイールの衝突検出は、ローカル座標の Y 軸を通じて、Center から下に光線を放つことで実行されます。ホイールには、Radius があり、Suspension Distance に応じて、下に延長できます。車両は、motorTorque , brakeTorque , steerAngle プロパティーを使用して、スクリプトから制御できます。詳細については、Wheel Collider scripting reference を参照してください。
ホイールコライダーは、スリップベースの摩擦モデルを用いて、物理特性エンジンとは別に摩擦を計算します。これにより、より現実的な動作が可能になりますが、標準の Physic Material 設定を無視するようになります。
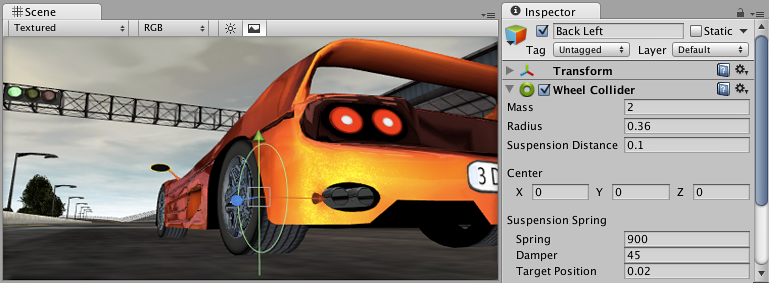
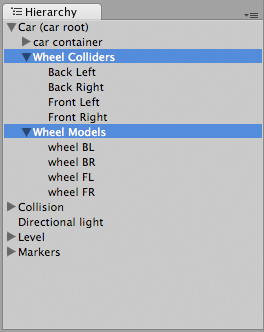
ホイールコライダーの設定
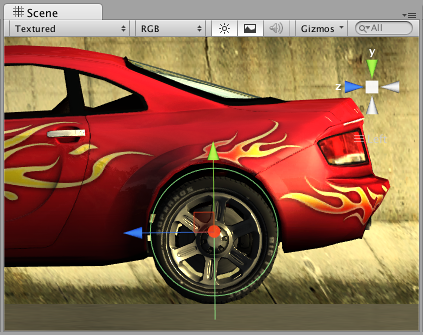
ホイールコライダーオブジェクトを回転させて、車両を制御するわけではありません。ホイールコライダーが追加されたオブジェクトは常に車両に固定される必要があります。しかし、ホイールのグラフィック表示を回転させたい場合、ホイールコライダーと表示されているホイールに対して個々のオブジェクトを設定することです。
ホイールコライダーのギズモグラフィックの位置は再生中には更新されないので注意してください。
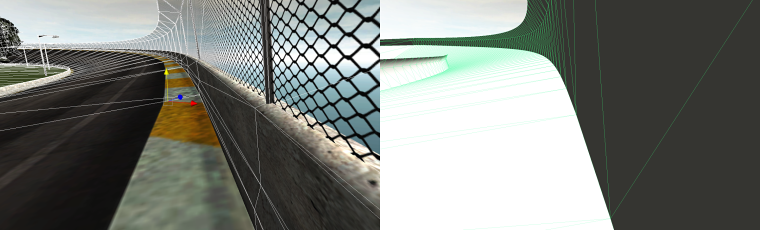
衝突ジオメトリ
車両は高速で走行するため、レーストラックでの衝突ジオメトリを正しく設定することが重要です。特に、Mesh Collider に表示されているモデル (フェンスのポールなど) に小さい凹凸があってはいけません。レーストラックに対する衝突メッシュは通常、表示メッシュとは独立して生成され、衝突メッシュをできるだけ滑らかにします。また、薄いオブジェクトがあってもいけません。トラックの境界が薄い場合、衝突メッシュでそれを広くします (あるいは、車両がそこにいけない場合は、反対側を完全に除去します)。
ホイール摩擦カーブ
摩擦は、下記の Wheel Friction Curve によって説明できます。ホイールの前進 (回転) 方向や横方向に対し、個々の曲線があります。両方向で、タイヤがスリップする量を最初に決定します (タイヤのゴムと道路間の速度差に基づきます)。次に、接点にかけられるタイヤの力を決定するのに、このスリップ値が使用されます。
曲線は入力としてタイヤのスリップを測定し、出力として力を供給します。この曲線は、2 つのセグメントのスプラインによって近似化されます。1 つ目のセグメントが (0, 0) から ( ExtremumSlip , ExtremumValue ) の終点まで構成されています。この終点で曲線の接線が 0 になります。2 つ目のセグメントが ( ExtremumSlip , ExtremumValue ) から ( AsymptoteSlip , AsymptoteValue ) の終点まで構成されています。この終点で再び曲線の接線が 0 になります。
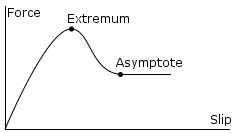
現実のタイヤはゴムが延長することでスリップを軽減するので、低スリップの場合、強い力を発揮します。さらにスリップする力が高くなった場合、タイヤが滑ったり、回転し始めたときに力が減ります。そのため、タイヤの摩擦曲線は、上記画像のような形状になります。
| プロパティー: | 説明: |
|---|---|
| Extremum Slip/Value | 曲線の極値点。 |
| Asymptote Slip/Value | 摩擦曲線の漸近線のスリップ、およびフォース値 |
| Stiffness | Extremum Value と Asymptote Value に対する乗数 (デフォルトは 1)。摩擦の剛性を変化させます。これを 0 に設定すると、ホイールからのすべての摩擦が完全に無効になります。通常、ランタイム時に剛性を修正して、スクリプトから各種地盤材料をシミュレートします。 |
ヒント
- より安定した車両の物理特性を得るため、特に速い速度で走行するレーシングカーの場合に、Time Manager で、物理特性タイムスタンプの長さを短くすることができます。
- 車両があまりにも簡単に転倒するのを防ぐには、スクリプトから、その Rigidbody の重心を少し下げ、車両の速度に応じた下向きへの圧力を加えます。