Warning
Warning: Unity Simulation is deprecated as of December 2023, and is no longer available.
Using Prebuilt LiDARs
Note
This feature is available starting from version 0.4.1 of the Simulation Sensors package.
The prebuilt LiDAR models that we provide are:
To use the prefabs, import the Prebuilt Sensors from the Package Samples by going to Window > Simulation > Sensors > Prebuilt Sensors > Import Prebuilt Sensors. You can then instantiate a prefab in the scene by clicking on it.
Alternatively, you can go to Window > Package Manager > Simulation Sensors > Samples, then click the Import button next to Prebuilt Sensors. The prefabs can be found in the Assets > Samples > Simulation Sensors > {version} Prebuilt Sensors > Prefabs in the Project window. There is also a scene for each prefab within the Scenes folder which shows each prefab in action.
You can also instead add them directly in the Hierarchy by right-clicking, going to Simulation > Prebuilt Sensors and selecting the sensor you want.
Each of the prebuilt LiDAR models utilizes the Raytraced Lidar Sensor for base functionality. The specifications for each prefab can be seen below. The values are fixed and cannot be modified (except in situations where there are multiple options for a parameter) since the values come from the data sheet for each sensor. Note that all units are in either meters or degrees, unless otherwise noted.
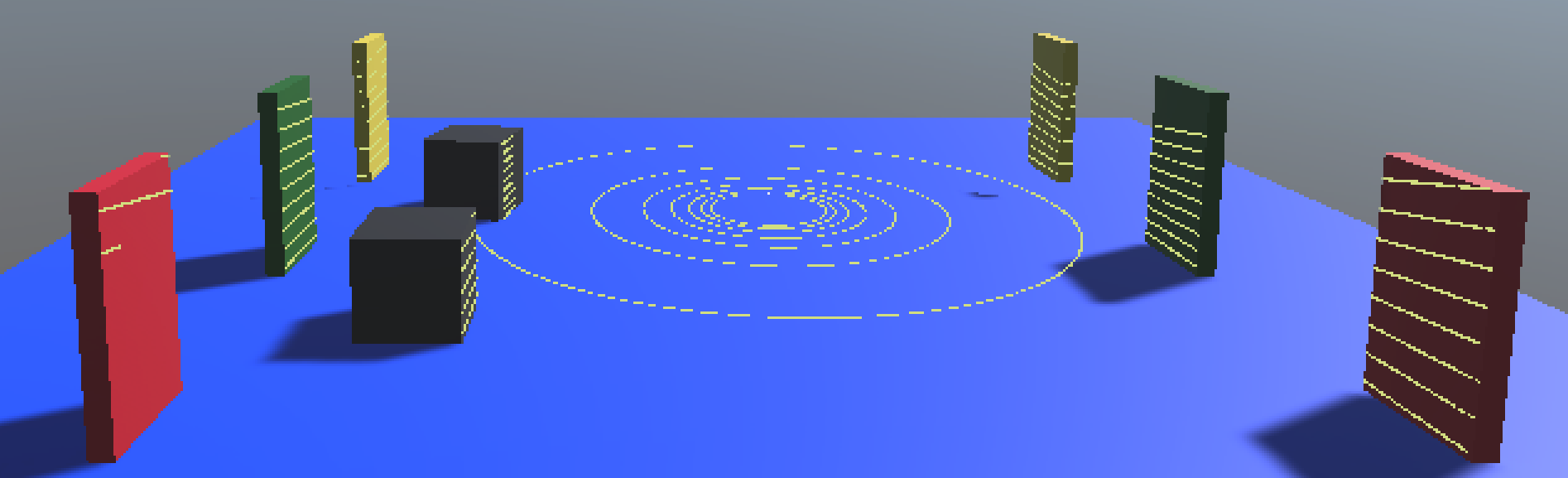
Comparing our LiDAR sensors to the real world
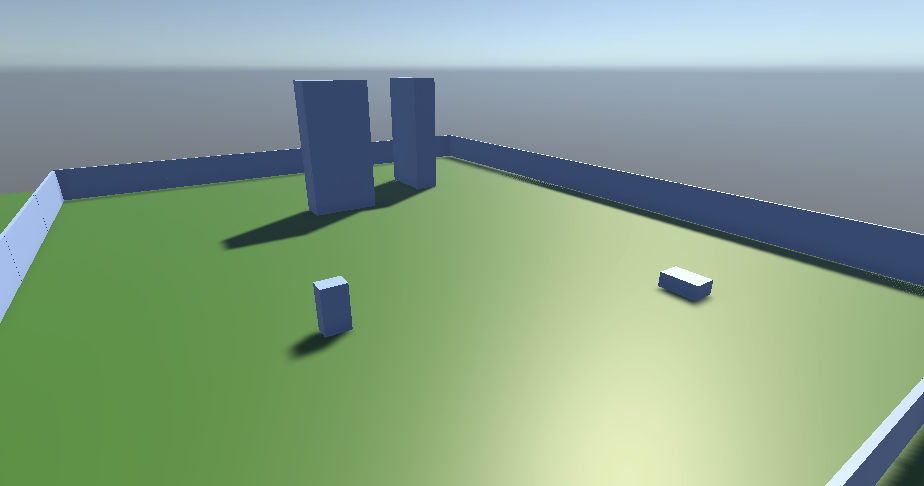
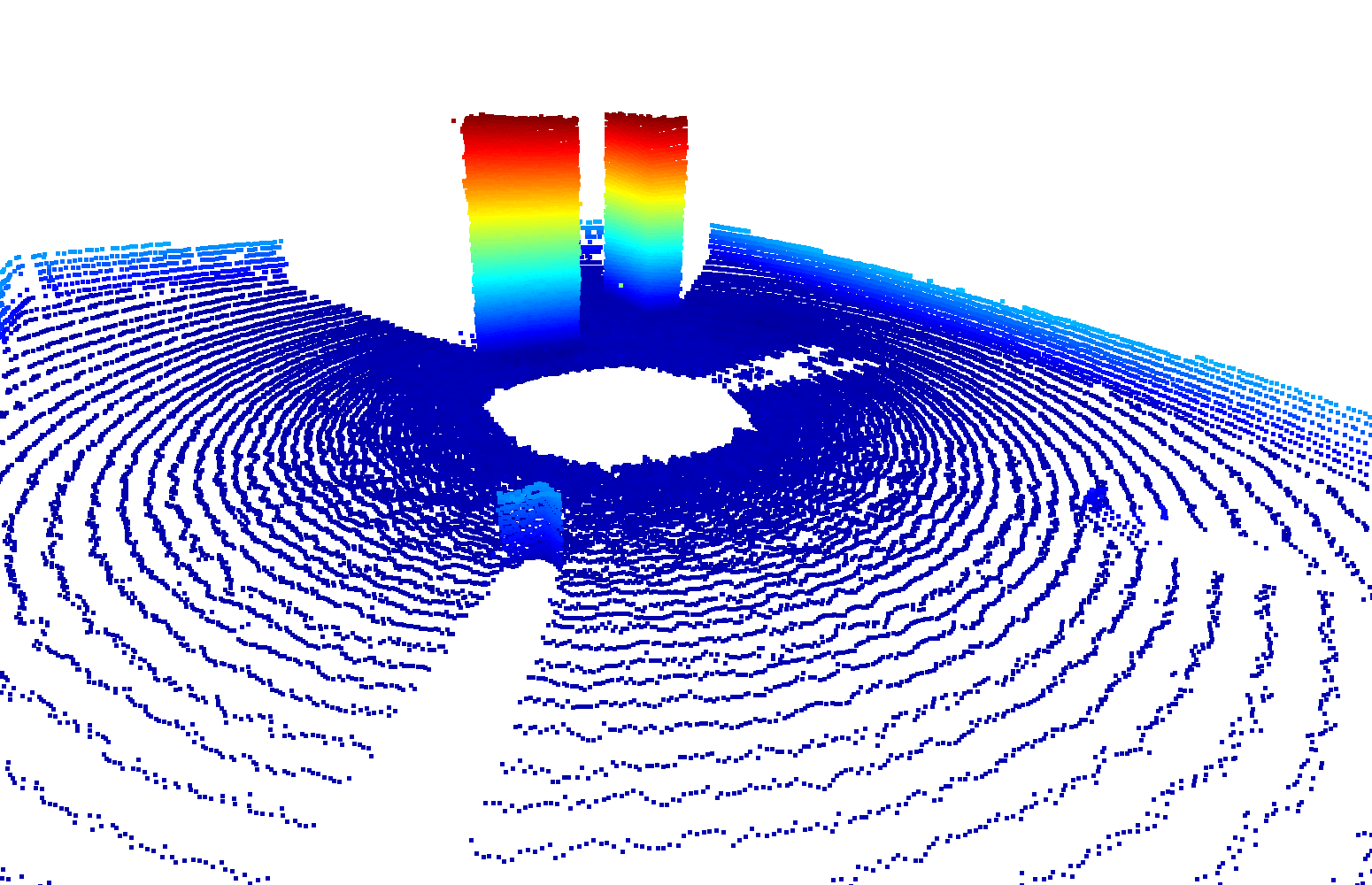
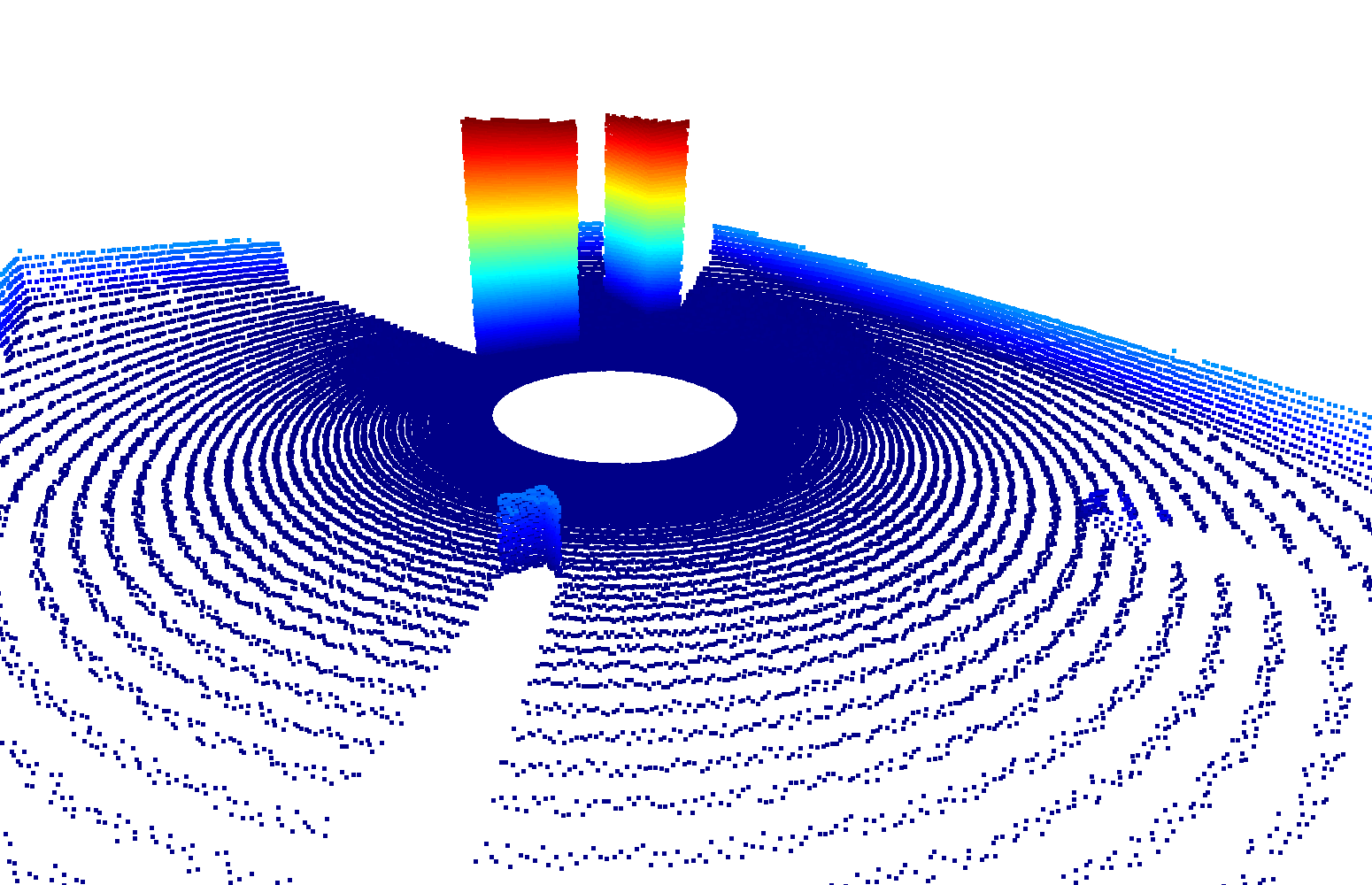
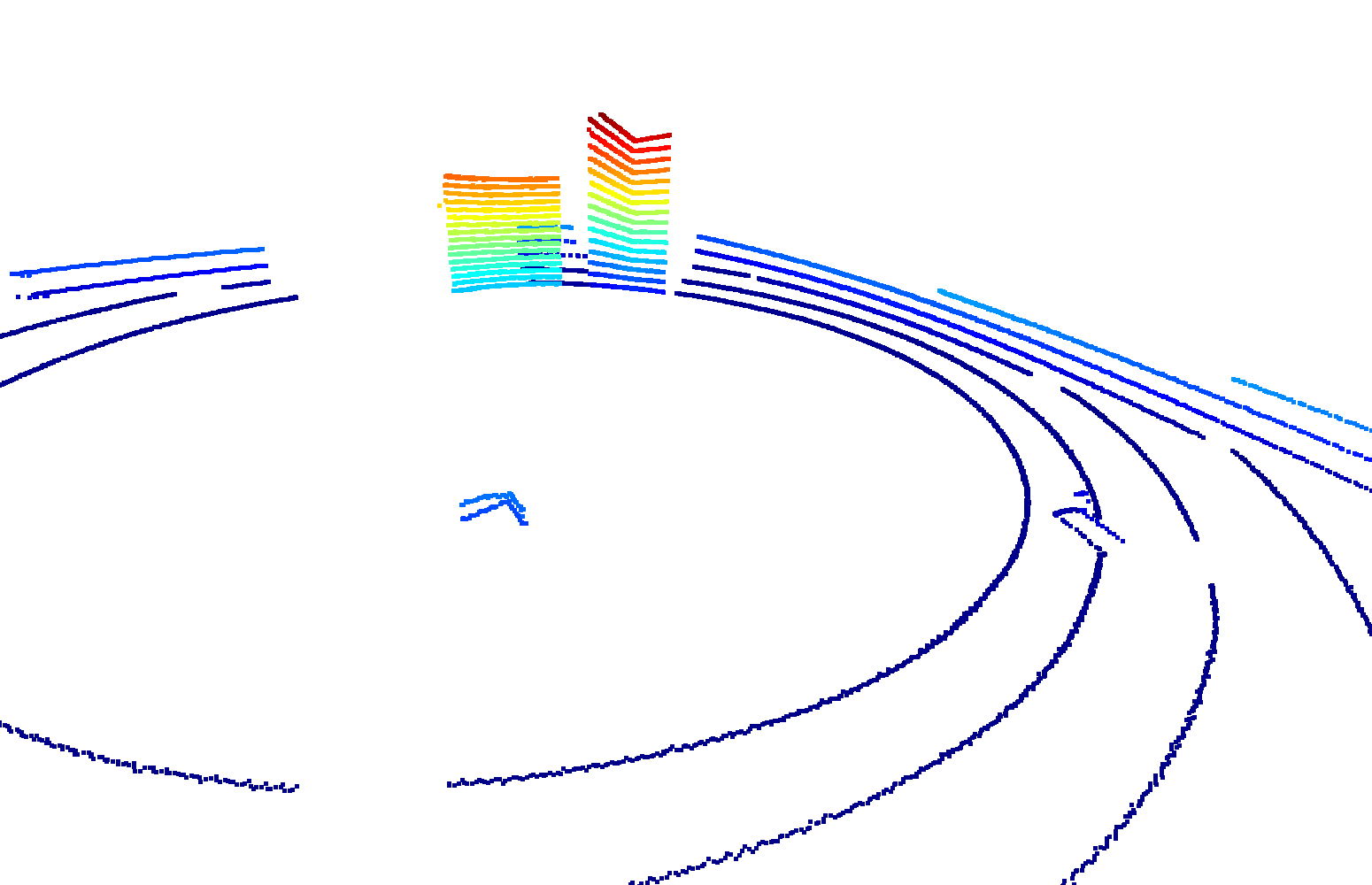
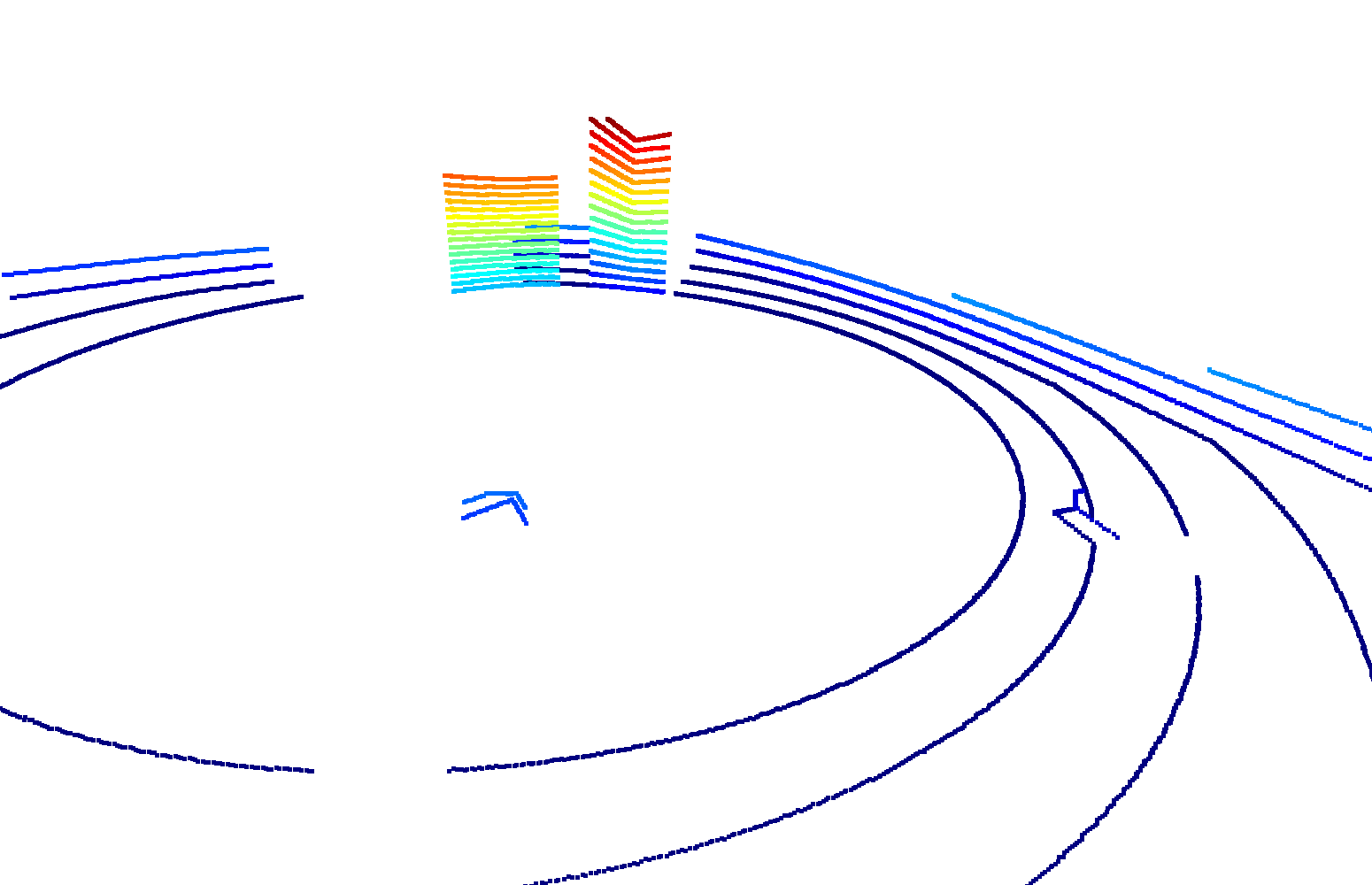
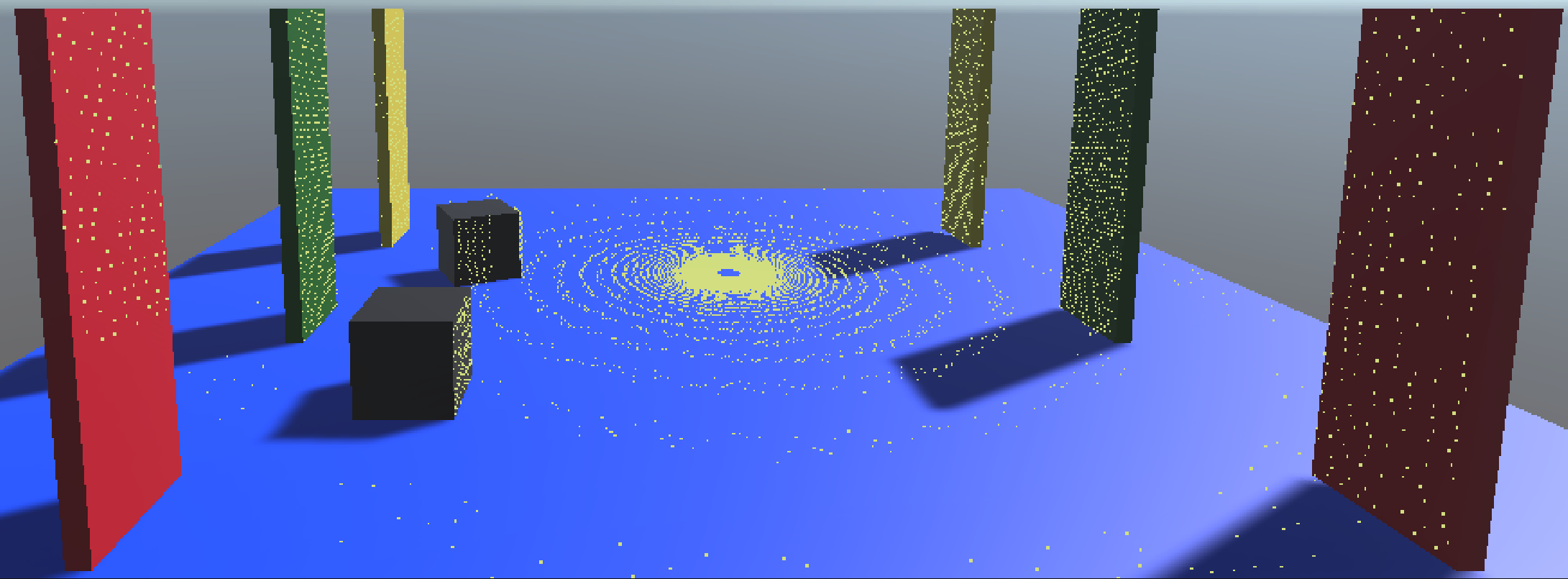
To compare the Prebuilt LiDAR sensors in Unity Simulation Pro to the real world, we LiDAR-scanned a real-world location using an Ouster OS0 128 and a Velodyne Puck. This process was then replicated in the Unity Editor, where we recorded the data from the USP Prebuilt LiDAR sensors in an identical Unity Scene. The data was then compared to the real world data and its accuracy was measured to ensure that the data from the USP Prebuilt LiDAR sensors matched the data from the real world.
To compare the data from our sensors in the virtual environment to the data from the real world, we calculated the distance between each point from the Unity scene and the closest point in the real world data. We then calculated the percentage of points where this distance was greater than 5 cm.
The results of this analysis can be seen in the table below:
| LiDAR Sensor | Points off by more than 5 cm (compared to real world data) |
|---|---|
| Ouster OS0 128 | 7.91226% |
| Velodyne Puck | 4.43004% |
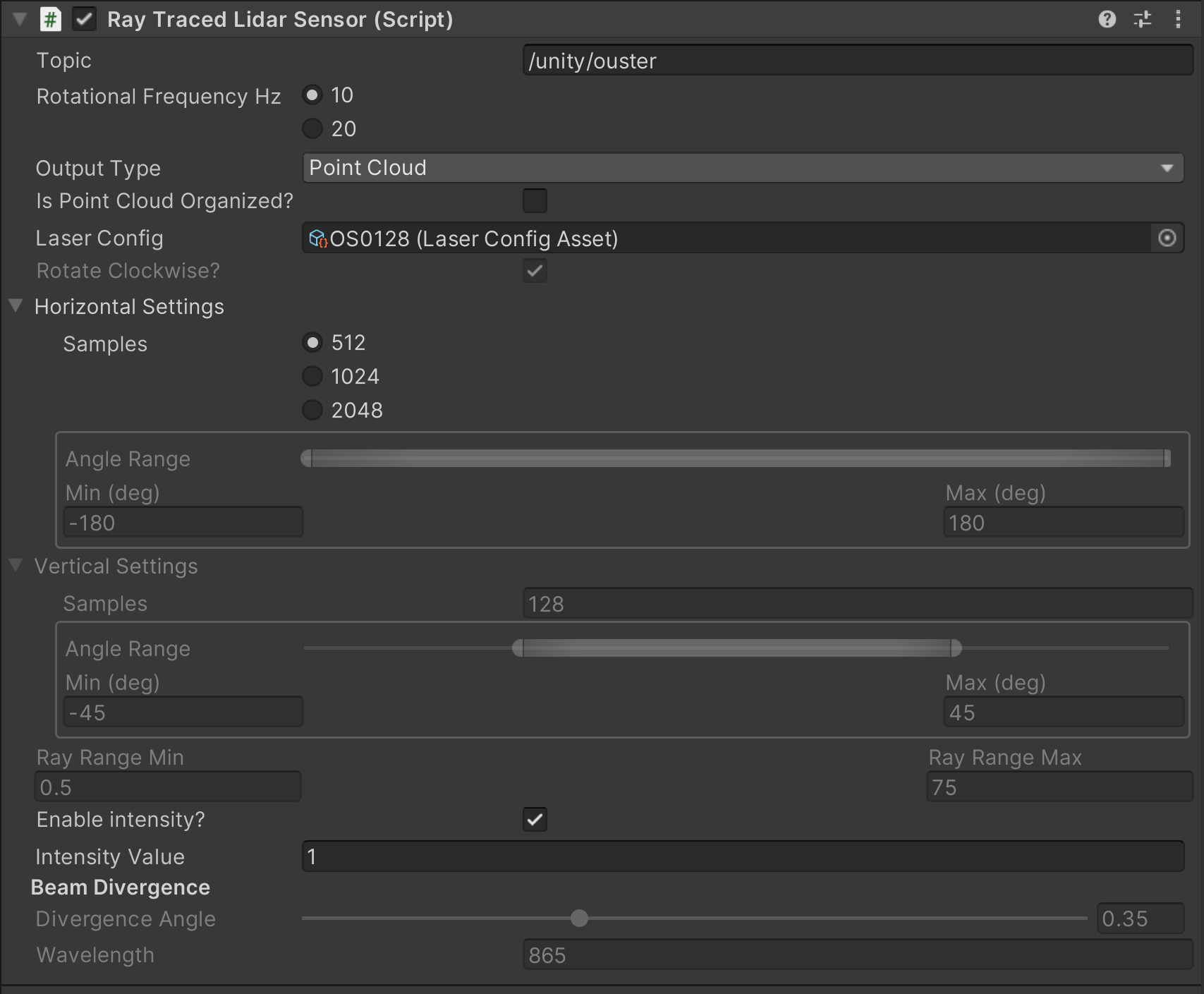
Ouster OS0 128
The Ouster OS0 is a 90 degree Field of View LiDAR that is best used for near-range distances with dense environments, such as a warehouse.
| Parameter | Value |
|---|---|
| Rotational Frequency | 5 or 10 |
| Horizontal Samples | 512, 1024 or 2048 |
| Horizontal Angle Range | -180 to 180 |
| Vertical Samples | 128 |
| Vertical Angle Range | -45 to 45 |
| Ray Range Min | 0.3 |
| Ray Range Max | 75 |
| Divergence Angle | 0.35 |
| Wavelength | 865 nanometers |
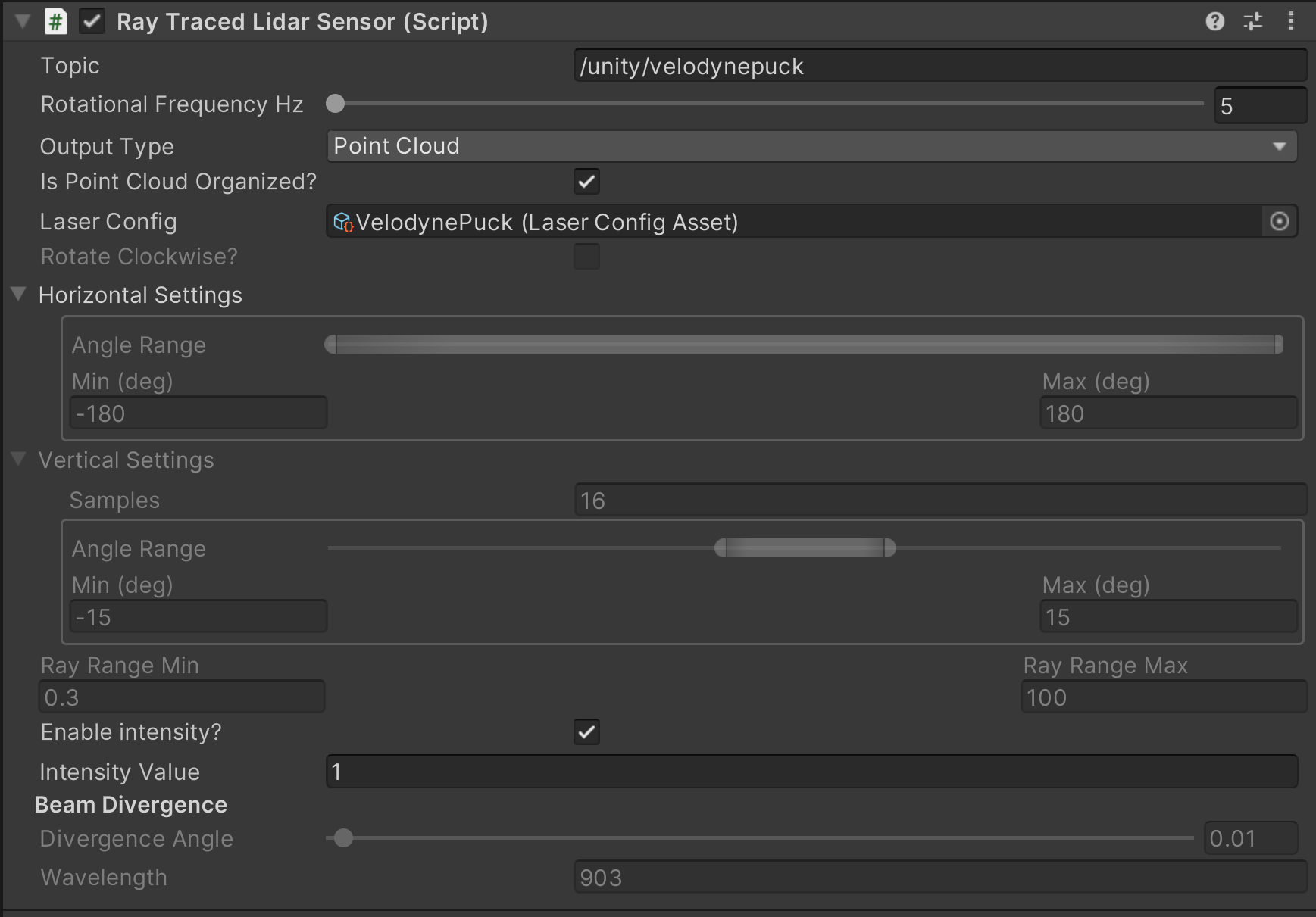
Velodyne Puck
The Velodyne Puck is a compact long-range LiDAR that can be used in applications like autonomous vehicles.
| Parameter | Value |
|---|---|
| Rotational Frequency | Integers from 5-20 |
| Horizontal Samples | Calculated based on Rotational Frequency |
| Horizontal Angle Range | -180 to 180 |
| Vertical Samples | 16 |
| Vertical Angle Range | -15 to 15 |
| Ray Range Min | 0.3 |
| Ray Range Max | 100 |
| Wavelength | 903 nanometers |
Note that although there is no divergence angle specified for this sensor, the divergence angle is set to 0.01 degrees in Unity Simulation Pro to ensure that the wavelength is correctly modeled.
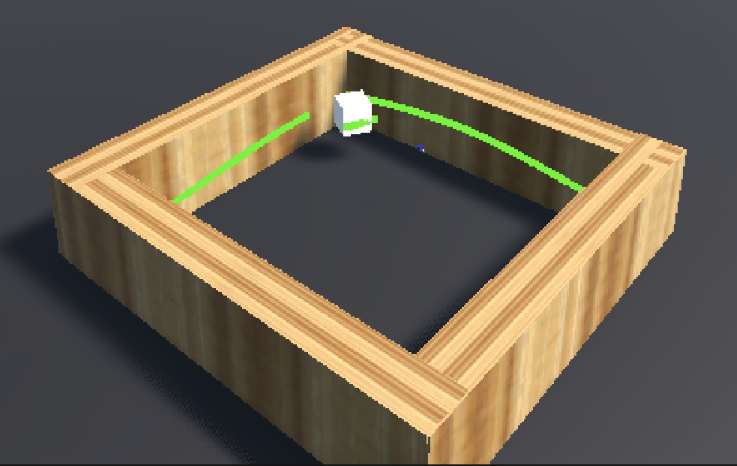
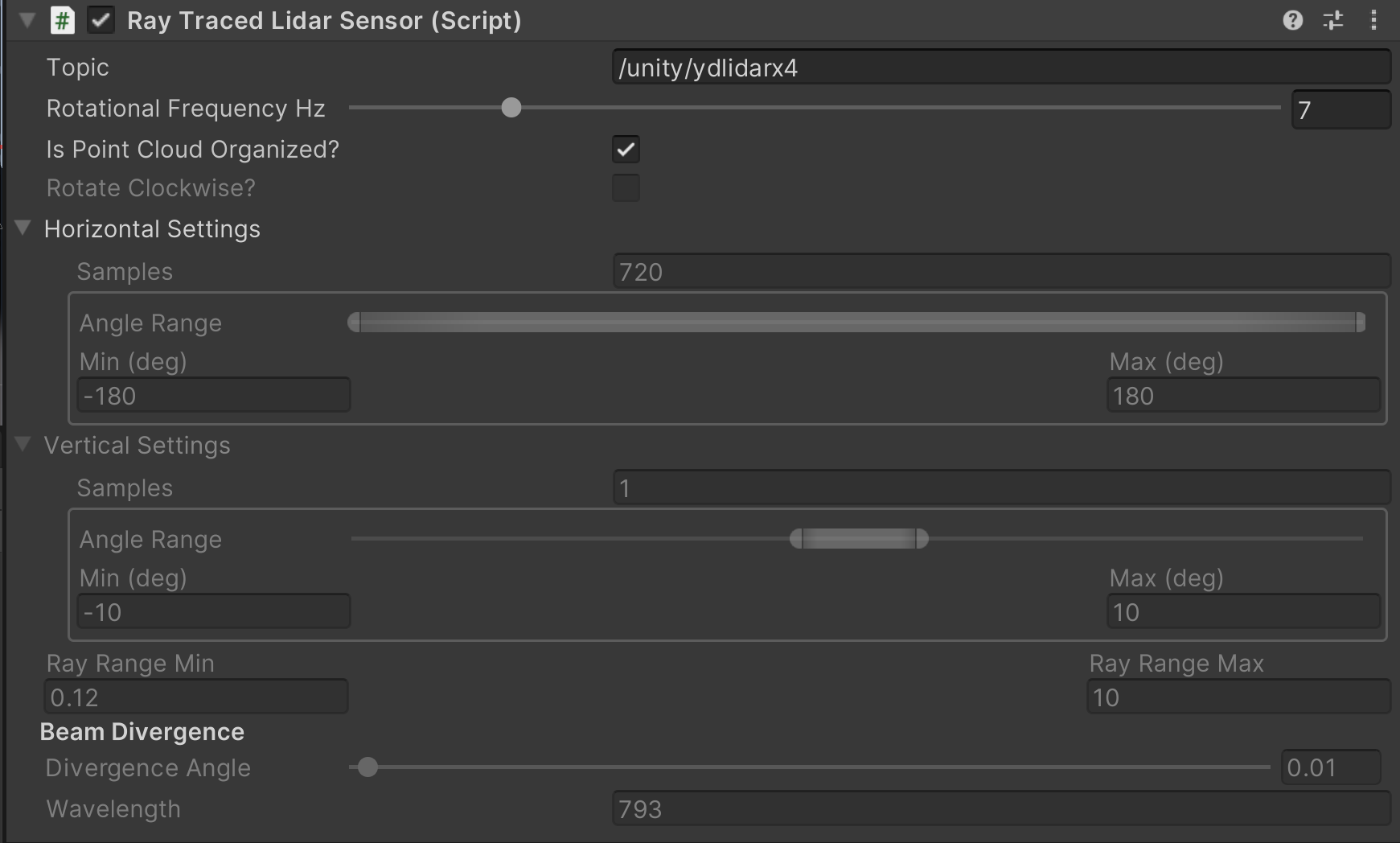
YDLIDAR X4
The YDLIDAR X4 is an affordable 2D LiDAR that is used for small scale applications, like robotics education or within a house.
| Parameter | Value |
|---|---|
| Rotational Frequency | Range from 6-12 |
| Horizontal Samples | 720 |
| Horizontal Angle Range | -180 to 180 |
| Vertical Samples | 1 |
| Vertical Angle Range | -10 to 10 |
| Ray Range Min | 0.12 |
| Ray Range Max | 10 |
| Wavelength | 793 |
| Intensity | N/A |
Note that although there is no divergence angle specified for this sensor, the divergence angle is set to 0.01 degrees in Unity Simulation Pro to ensure that the wavelength is correctly modeled.