ToF Camera
The Time of Flight camera is intended to emulate a camera that measures depth using the time it takes for emitted light to get back to the photosensor.
Implementation details
Warning
This sensor has a node that uses DXR and will not function without a compatible graphics card. See requirements for more details.
This camera uses path tracing to resolve a frame. It also uses the same material as the lidar so the intensity measured is influenced by the wavelength specified.
Inputs
| Input | Description |
|---|---|
| FrameRate | The number of output frames per second. |
| MinRange | Sets the minimum range registered by the device. |
| MaxRange | Sets the maximum range registered by the device. Every sample outside the max range will have a distance of 0 meters. |
Outputs
| Output | Description |
|---|---|
| PointCloud | A render texture with the (x, y, z) position for each pixel. The camera frame is spread from left to right in the texture. To know the point count, one can look at the count value in this structure. |
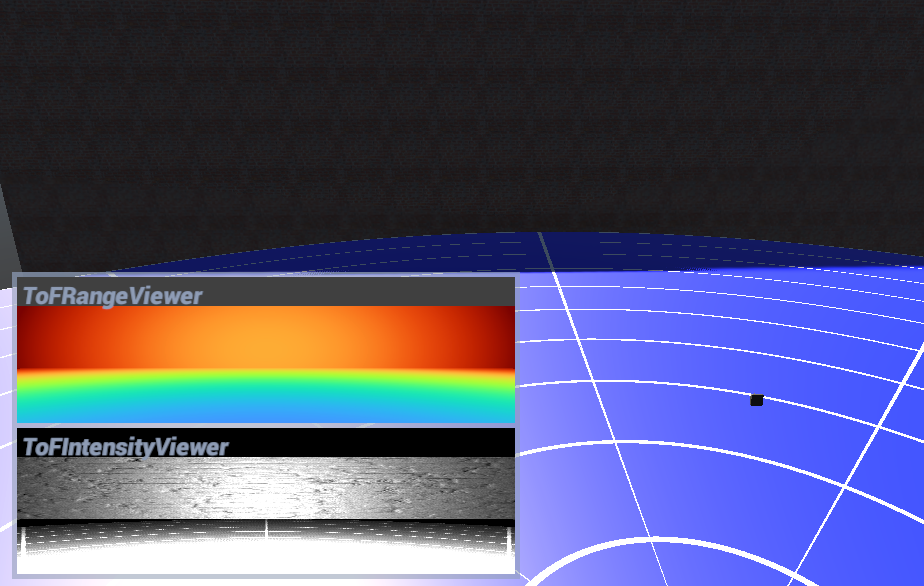
| Intensity | A render texture resident on the GPU with intensity stored in Watts/m^2. |
| Range | A render texture resident on the GPU with range values, in meters. |
| OutTranscode | Provides a context for executing sampling custom passes, which then passes through the GPU processing pipeline. |