Warning
Warning: Unity Simulation is deprecated as of December 2023, and is no longer available.
Set up TFBroadcaster for Sensors
The TFBroadcaster is used to track the frames of the hierarchies containing sensors. It is useful when computing transforms of the sensor data.
Usage
The sensor must have a parent with an
ArticulationBodycomponent. The name of the parent is used as the sensor's frame ID. For example, a parent object or a frame could be a world frame, a gripper frame, or a head frame of a robot.The sensor's local transformation should be identity (i.e. position and rotation must be set to 0s and scale should be 1) to correctly compute the transform using messages published from the TF Broadcaster. Note: Stereo depth sensor uses two CameraSensors internally which have non-zero position values.
Add the
TFBroadcastercomponent to the root GameObject of theArticulationBodyhierarchy in the scene.

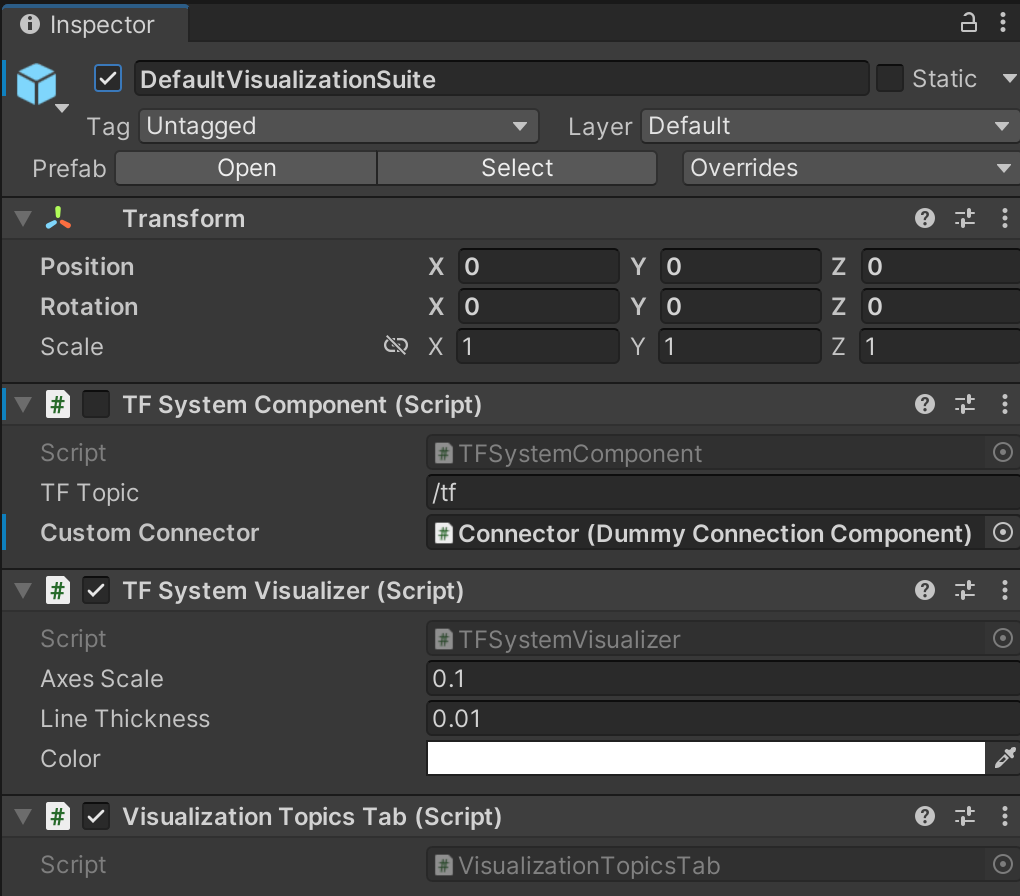
Along with
TFBroadcaster, there should be a singleTF Systemcomponent in the scene to publish transform data. TheTF Systemcomponent should be placed in the same GameObject as theConnectioncomponent, for example a Dummy Connector or a ROS Endpoint Connector. Note that there can be only oneTFSystemcomponent in your Unity scene. So make sure to check other GameObjects such asDefaultVisualizationSuitethat containsTFSystem, and disable all but oneTF Systemcomponent in the scene.