Parallel stereo camera
The parallel stereo camera emulates a depth-sensing camera based on stereoscopic vision.
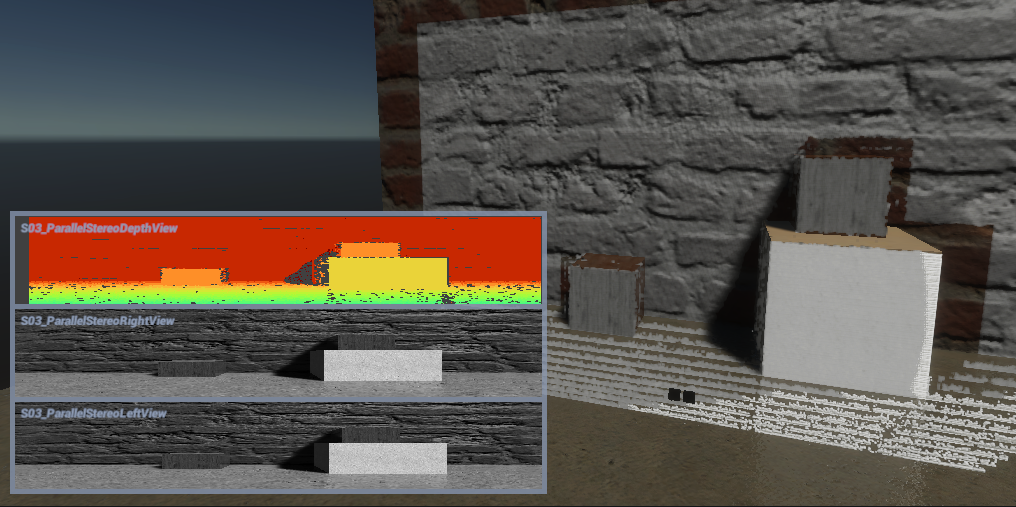
Implementation details
This camera uses two red cameras (bound to game objects of the scene) and triangulate pixels to figure out a depth for each pixel.
The baseline between cameras is computed once at the start of execution and is assumed constant. The transformation from left view to right view must be a pure non-zero translation along the positive X axis, otherwise an error is reported.
The pixel matching is sensitive to variations in the frame. A flat featureless surface will result in failure to find a good depth.
To reduce noise, a speckle filter is applied after pixel matching. The filter invalidates the pixel if there is too much disparity variation in its neighborhood. Disparity variation is defined as the difference between the minimum and maximum disparities inside the speckle filter window.
The current implementation assumes pixels are square, and thus requires the image aspect ratio (ResolutionH/ResolutionV) to be the same as the sensor aspect ratio (SensorWidth/SensorHeight).
Inputs
| Input | Description |
|---|---|
| ResolutionH | Horizontal number of photocells on the photosensor array. |
| ResolutionV | Vertical number of photocells on the photosensor array. |
| SensorWidth | Physical width of the photosensor array, in millimeters. |
| SensorHeight | Physical height of the photosensor array, in millimeters. |
| FramesPerSecond | Number of captured frames per second. Automatically capped to 1 / ExposureTime. |
| ExposureTime | The amount of time the photosensor is capturing light, in seconds. |
| Gain | Amplification factor applied to the captured light. 1.0 is the default gain; more than 1.0 is brighter; less than 1.0 is darker. |
| PatchSize | Kernel side width used to make the pixel's pattern matching. Between 3 and 31. Must be odd. |
| DisparityMin | Distance, from the pixel we want to match, to start the pattern matching. |
| DisparityMax | Maximum distance from the pixel we want to match to execute the pattern matching. |
| FocalLength | Distance between the lens and the sensor, in millimeters. |
| SpeckleWindow | The size of the window, in pixels, for the speckle filter. Must be odd. Set to 0 to disable. |
| DisparityVariation | The maximum allowed disparity variation, in pixels, inside the speckle filter window. |
Outputs
| Output | Description |
|---|---|
| Left | A render texture of the left view, resident on the GPU with intensity stored in lumens. |
| Right | A render texture of the right view, resident on the GPU with intensity stored in lumens. |
| Depth | A render texture of the depth (Z coordinate), resident on the GPU. |
| PointCloud | A render texture with the (x, y, z) position for each pixels. |
| OutTranscode | Provides a context for executing sampling custom passes, which then passes through the GPU processing pipeline. |